



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人手爪的研究现状与进展
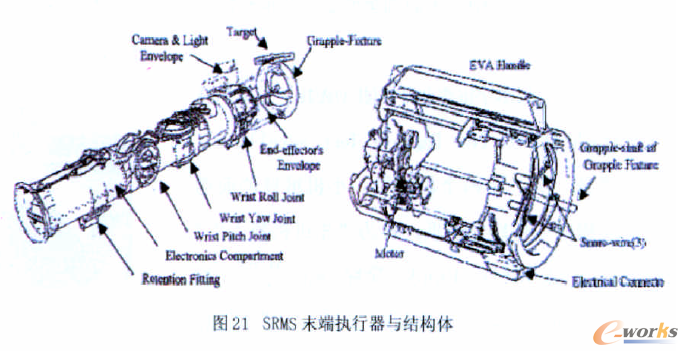
加拿大SPAR公司与美国宇航局从1975年开始联合研制大型的遥控机械臂SRMS(Shuttle RemoteManipulator System,SRMS),后来以加拿大臂著称,见图21。1984年,SRMS正式被用于协助宇航员进行舱外活动,标志着空间机器人进入使用阶段。SRMS被安装在航天飞机的货舱口上,具有6个自由度,中间两臂长达7米,采用主从操作和局部自主操作。SRMS已在空间多次成功地进行了轨道飞行器的组装、维修、回收、释放等操作,并将承担国际空间站初始组装阶段的主要装配任务。
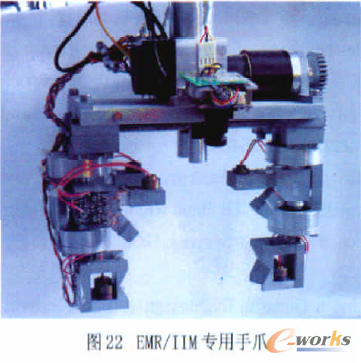
中国科学院合肥智能机械研究所在2003年研制出平行两指舱外移动机器人手爪EMR/IIM,手爪的结构如图22所示,依靠两个相同的手爪在舱外的工字梁上交替行走和抓取,完成抓取任务。手爪由一对平行指面构成,只有一个对捏的夹持自由度。该手爪具有以下几个特点:具有自锁功能,在断电情况下能够保持抓紧状态;手指作平行运动,手指中心位置在夹持过程中保持不变;手爪至腕部距离较短,有利于提高刚度和承载能力;具有一定的被动柔顺功能,依靠两个特殊的微动指面调整和吸收一定范围内的机械臂姿态偏差,自适应能力强;具有视觉、力觉、接近觉等多种感知功能。目前,该手爪已经应用到我国空间机器人舱外行走的地面演示系统中。
3 手爪的关键问题和未来发展
机器人手爪研究的关键在于:安全可靠性、自适应性和更高的智能。安全可靠性研究确保整个机器人系统工作万无一失,因此,要求其手爪结构和控制系统要简单化。对于舱外专用手爪,需要设计机械柔顺结构弥补自由飞行机器人控制系统精度误差,吸收存在的微小位置和角度偏差,有利于自动对接或捕获目标。对于服务机器人手爪,需要提高通用性,使得手爪具备适应各种被抓物体形状的能力。由于受到遥操作通讯大延时和限量影响,手爪智能化研究可以提高手爪决策的本地化,减少通讯量,减少地面干预,减少出错的可能性。
机器人手爪的未来发展具有以下几个趋势:
1)小型化,集成化技术的发展;
目前手爪的体积和重量是制约手爪应用的一个重要的指标,如何缩小手爪的尺寸和重量是摆在世人面前的一个重要研究内容。
2)仿生技术的发展;
制造出像人手一样的机器人手爪是研究人员不懈的追求,因此无论是驱动和传动系统,还是制造类皮肤传感器,人们都试图从仿生的角度进行模拟,比如对于皮肤传感器的模拟,对于人工肌肉的模拟等。
3)主动信息获取技术的发展;
机器人传感器的研究正从被动感知向着主动感知的转变,被动感知的信息是局部的信息,而盲人对环境信息的感受是通过手臂,大脑记忆等协同完成的,从而使人们认识到主动式的感知过程是一种更好地获取外部环境和内部信息的方式。
4)信息的融合技术的发展。
4 结论
本文总结了国内外在多指灵巧手研究方面的成果分析及其特点和不足,从而推断出多指灵巧手的设计正日趋复杂化、精巧化和控制的精确化,并逐步接近人类手的造型和功能。机器人灵巧手的灵巧程度取决于其驱动系统,而驱动系统的组成部分驱动器和传动系统正在不断创新与发展。人工肌肉驱动器及新型的气压驱动器将是今后发展的热点,具有多种感知功能的仿人机器人灵巧手将有很好的应用前景。例如:依靠空间机器人从事空间站物品搬运、装配及空间站维修等工作,而机器人智能手对于空间机器人的工作能力具有重要意义,仿人机器人灵巧手将用于战场探雷和排雷、核工业设备的检测和修理等危险作业及水下机器人的水下作业。此外,仿人机器人灵巧手还可以应用于残疾人假手、老人院生活服务等领域。
- 第1页:机器人手爪的研究现状与进展(1)
- 第2页:机器人手爪的研究现状与进展(2)
- 第3页:机器人手爪的研究现状与进展(3)
- 第4页:机器人手爪的研究现状与进展(4)
- 第5页:机器人手爪的研究现状与进展(5)
- 第6页:机器人手爪的研究现状与进展(6)
- 第7页:机器人手爪的研究现状与进展(7)
- 上一篇文章:机器人远程手术研究状况与展望
- 下一篇文章:水下机器人发展趋势