



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人手爪的研究现状与进展
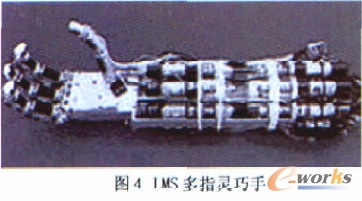
1998年Université de Poities大学研制成功了LMS多指灵巧手,如图4所示。该手有四个手指,由16个连杆组成,具有16个可控自由度,能够包络抓取和用指间捏取,同样采用腱和滑轮传输的方式,尺寸接近于人手,该手的特点是传动设计的布局比较合理,结构相对紧凑。不足之处是虽然具有冗余的自由度,但实现的抓取功能不理想。
意大利Bologna大学先后研制成功了UB-I和UB-II手。其中,1992年研制的UB-II手爪如图5所示。该手爪有三个手指,采用绳索(腱)和滑轮的方式进行驱动,手指11个自由度,加上2个腕部自由度共有13个自由度。手的中心具有手掌,尺寸接近于人手。在UB-II手上装有9个内置式触觉传感器,可以检测作用在已知表面的力和力矩,并且在进行适当假设的情况下,可以计算给定表面的接触点的位置。

DIST手也是意大利研究人员在1998年研制成功的,是由17个连杆组成具有16个自由度的四指灵巧手,如图6所示。为了减轻重量,手指的关节采用连杆组合,关节中部是中空的,因此,抓取物体时不适合采用关节指面的接触方式,每个手指有4个自由度,通过5个直流电机驱动6根腱和滑轮的方式进行驱动,具有体积小,重量轻等优点。

在国内,通用手爪的研究最早是在张启先院士的主持下,由北京航空航天大学机器人研究所于80年代末开始的灵巧手研究与开发。最初研究出来的BH-1灵巧手是一种仿JPL的灵巧手,功能相对简单,但填补了当时国内空白。在随后的几年中又不断改进,研制出BH-3型灵巧手,如图7所示。该手爪有三个手指,每个手指有三个关节,共9个自由度。微电机放在灵巧手的内部,各关节装有关节角度传感器,指端配有三维力传感器,采用两级分布式计算机实时控制系统。BH-3手爪能灵巧地抓取和操作不同材质、不同形状的物体,它能够完成装配、搬运等操作,可以用来抓取鸡蛋,既不会使鸡蛋掉下,也不会捏碎鸡蛋。

哈尔滨工业大学和德国宇航中心合作,2003年研制成功HIT/DLR多指灵巧手,如图8所示,大大促进了我国在灵巧手技术方面的发展。该手爪有四个相同结构的手指,共有13个自由度,手的尺寸略大于人手,手的每个手指能提起1kg的重物,整体重量1.6kg。灵巧手涵盖数量众多的传感器,该手能够实现基于数据手套的远程遥控作业。由于沿用了德国宇航中心DLR四指灵巧手的设计思路,因此,HIT/DLR的优缺点基本上和DLR手爪相同。

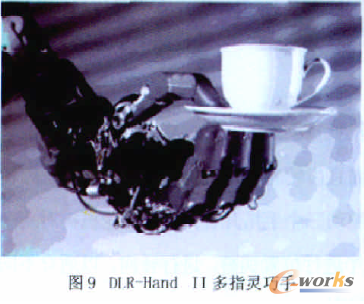
为了执行复杂的舱内空间机器人操作任务,继ROTEX手爪之后,德国宇航中心研制又研制出三指灵巧手和第一代、第二代四指灵巧手,其研制的第二代四指灵巧手,如图9所示。该手具有12个自由度,每个手指的3个独立关节由无刷直流电机、谐波齿轮和基关节锥齿轮组成。不同的关节具有不同的结构,2自由度的基关节采用差分锥齿轮驱动方式。同时,由于尺寸原因,谐波齿轮与电机结合在一起,关节差分方式可以在弯曲或伸展时完全利用两个驱动器的输出,这种方式减轻了每个电机的负担。手爪装备先进的智能传感系统,具有指尖五维力/力矩、位置、温度、类皮肤触觉、关节扭矩、速度传感器。第二代灵巧手比第一代能够进行更加精确的操作,协调性更好。图中进行抓取协调实验:抓取一个茶杯。
- 第1页:机器人手爪的研究现状与进展(1)
- 第2页:机器人手爪的研究现状与进展(2)
- 第3页:机器人手爪的研究现状与进展(3)
- 第4页:机器人手爪的研究现状与进展(4)
- 第5页:机器人手爪的研究现状与进展(5)
- 第6页:机器人手爪的研究现状与进展(6)
- 第7页:机器人手爪的研究现状与进展(7)
- 上一篇文章:机器人远程手术研究状况与展望
- 下一篇文章:水下机器人发展趋势