



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人手爪的研究现状与进展
1.3 抓取控制和决策系统
1.3.1 抓取稳定性研究
研究机器人手爪多指抓取的目的是通过探索人类的抓取机理,最终开发出一种能够抓取任意形状物体,操作和使用工具,完成多种抓取任务,模拟人手抓取行为的拟人手。到目前为止,机器人手爪的多指协调操作与控制技术还不能满足细微操作的要求,离真正实用化还有一定的距离。抓取稳定性研究在很大程度上是探索多指抓取的机理,分析多指抓取细微运动和力的作用,稳定性分析是抓取控制的基础工作。具体的工作是进行理论分析,总结出能够适应一般条件下的算法。
1.3.2 规划和决策系统
自主抓取规划是手爪根据各种传感器的信息,不需要和主机进行通讯,自主进行规划和决策。例如,舱外专用手爪传感器的本地自主能力,根据传感器的信息自主判断手爪和目标之间的姿态和位置。服务机器人手爪遇到一个不规则形状的物体,自主决策采用何种方式进行抓取等。自主规划决策可以提高手爪的智能,减少手爪和主控计算机之间的通讯限量和大延时带来的不便,减少出错的可能性。规划抓取的轮廓布局与力的分布,制定多指抓取的协调控制策略。
1.3.3 抓取控制
在稳定性分析和抓取规划研究的基础上,需要研究的是手爪的控制策略。由于目前手爪采用腱和连杆等传动方式,因此,控制仍然比较复杂。复杂的控制策略是机器人采用多指灵巧手遇到的一个最大障碍,其本身具有闭链多环特征,存在控制的不唯一性、运动的协调性等问题。目前手爪的主要控制方法为:阻抗控制,力控制和阻尼控制,位置控制等。
1.4 其他研究
对于特殊环境下的机器人如空间机器人或水下手爪设计,每一个细节都需要在模拟的环境下做大量的试验,验证整个手爪系统的可靠性,包括机械结构和控制系统的试验,防辐射试验,高低温试验,机械润滑试验,电路冗余备份以及微重力环境试验。对于空间舱外工作的手爪来说,这种重要性是可想而知的。可靠抓取是所有设计的前提条件,涉及整个手爪分系统乃至整个机器人系统。研究内容包括手爪的机械结构的适应性;控制系统的精确性;空间环境的安全性等。结构和控制的简单化是增加手爪安全可靠性的一个重要措施。一些手爪还采用先捕获后抓取的结构,以增加抓取的可靠性。空间机器人手爪在设计前,需要通过仿真软件对抓取过程的每一个细节进行模拟,发现可能存在的问题。
2 手爪的研究进展
2.1 通用手爪的研究进展
通用手爪分为拟人和非拟人两种,其中,拟人的多指灵巧手是通用手爪的一个重要的研究方向。人类与动物相比,除了拥有理性的思维、准确的语言表达外,还拥有一双灵巧的双手。人手是经过世世代代劳动的演变进化而成,结构小巧紧凑,抓取操作灵活稳定,给人类创造了巨大的财富。让机器人也拥有一双灵巧的手成了许多科研人员的梦想。
多指灵巧手最早的研究是为失去手臂的人安装假肢。之后,随着机器人技术的飞速发展,一些研究者试图研制出更加精巧的灵巧手,于是研究的方法和手段层出不穷,主要包含四个方面:人手基本生理结构的研究;手爪模拟人手的结构和功能;手爪感知系统的研究;手爪控制方法的研究,取得了一些有重要的研究成果,相继有一批著名的多关节多指灵巧手问世。
2.1.1 腱传动的机器人手爪
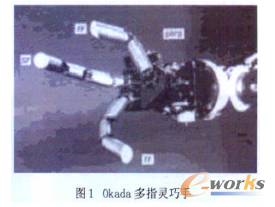
1974年,日本成功研制了Okada多指灵巧手,如图1所示。Okada手爪是第一个真正意义上的多指灵巧手。该手具有三个手指,有一个手掌,拇指有3个自由度,另两个手指各有4个自由度。各自由度都由电机驱动,并由钢丝和滑轮完成运动和动力的传递。这种手爪的灵巧性比较好,自身重量也比较小。但是,各个手指在结构上细长而单薄,难以实现校大的抓取力和操作力。
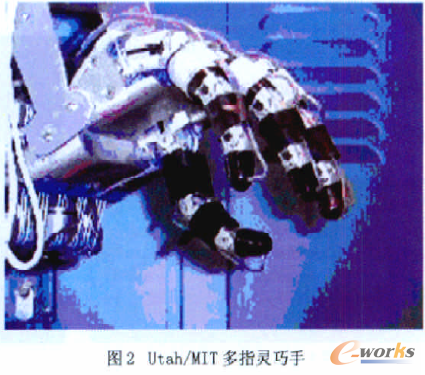
美国麻省理工学院和犹他大学于1980年联合研制成功了Utah/MIT手爪,如图2所示。手爪采用模块化结构设计,手指的配置方式类似于人手,有四个手指:拇指、食指、中指和无名指,四个手指结构完全相同,每个手指有4个自由度。手指关节采用伺服气动缸作为驱动元件,由腱和滑轮传动。为了实现最大的可操作度,采用了2N型腱驱动系统,每个关节通过一对运动相反的腱进行驱动,由气动操作的“膜”及其所驱动的16个活动连杆、184个低摩擦滑轮拉动手指产生动作。此外,手上装有16个传感器、32个张力传感器,大体上能够像人手一样对物体进行抓持和操作,通过手指表面安装的触觉传感器对物体进行初步的特征获取,以实现控制握力的大小。
美国斯坦福大学1983年研制成功Stanford/JPL多指灵巧手,如图3所示。该手爪采用模块化设计,没有手掌,有三个手指,每个手指有3个自由度,拇指和其他两个手指相对放置,体积和重量较大。关节一和二有90o的运动范围,末关节有135o的运动范围。手指由12个直流伺服电机作为关节驱动元件,采用腱和滑轮的传动方法,采用2N型和N型折中的N+1型的腱驱动系统传递运动和力。手指关节和滑轮由钢衬套铝管制成。

- 第1页:机器人手爪的研究现状与进展(1)
- 第2页:机器人手爪的研究现状与进展(2)
- 第3页:机器人手爪的研究现状与进展(3)
- 第4页:机器人手爪的研究现状与进展(4)
- 第5页:机器人手爪的研究现状与进展(5)
- 第6页:机器人手爪的研究现状与进展(6)
- 第7页:机器人手爪的研究现状与进展(7)
- 上一篇文章:机器人远程手术研究状况与展望
- 下一篇文章:水下机器人发展趋势