



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人远程手术研究状况与展望
长久以来,医生和患者在同一现场是进行诊断与实施手术的先决条件,正因如此许多地区由于交通不便,患者不能及时得到治疗而失去了最佳的治疗机会。在战场上受伤的战士由于抢救不及时导致死亡的更是数不胜数。这些痛苦的经历和血的教训使人们在积极寻求补救措施,随之产生了远程手术的构想,随着机器人技术和医疗技术的不断发展,远程手术也随之不断推进和完善。
远程手术是指医生与患者分别处于不同的地理位置,远程医生借助于视频、音频、图像、力觉等临场感的装备与技术参与开展手术的过程。一般把患者所在的位置称为患者端,把远程医生所在的位置称为医生端。从实时性与同步性角度可将远程手术分为3类,即离线方式、远程监控方式、交互方式。离线方式指医生端和患者端不同时发生通信交流,医生端接收由患者端发送的患者信息,然后医生对这些信息进行诊断,最后将诊断结果发回患者端,由在患者端的医生根据诊断结果开展手术。远程监控方式下医生端实时监测患者手术过程信息,并对手术过程给予指导和建议。交互方式需要医生端和患者端建立实时可靠的通信连接,医生端的医生借助力觉交互设备、操纵杆控制患者端的机器人执行手术指令开展手术。
1 机器人远程手术的发展及应用
1995年,由美国斯坦福国际咨询研究所(Stanford Research Institute International,SRI)开发了世界上第1个机器人远程手术原型(图1),当时主要针对的是开放性手术。2001年9月7日,在美国纽约和法国斯特拉斯堡之间实施了世界上第1例微创远程机器人辅助手术,两地相距7000km多。手术使用了由Computer Motion公司开发的宙斯(Zeus)机器人系统(图2a),接受手术的患者位于法国斯特拉斯堡,是1名68岁的胆结石患者,而外科医生位于美国纽约,最后手术获得了很大的成功,白此远程手术开始快速发展。

图1 宙斯(Zeus)外科机器人
由1999年成立的Intuitive Surgical公司,借助于SRI在医疗机器人方面的积累开发了具有远程功能的达芬奇(da Vinci)机器人(图2b),能开展泌尿、耳鼻喉、腹部、胸腔等远程微创手术,属于通用型的医疗机器人,并于2000年获得美国食品和药品管理局许可。
在da Vinci系统的基础上,在美国国防部支持下由SRI等多家研究机构开发了应对战场上无人看护环境下的远程手术机器人系统Trauma Pod(图2e),整套系统由手术机器人、护士机器人、手术器械更换装置、器具缓存装置、药物分发装置组成,能实现无人看护状态下的远程手术,预计2015年投入使用。
从2004年开始,在美国国家航空航天局(National Aeronautics and Space Administration,NASA)复杂环境任务组(NASA Extreme Environent Mission Operations,NEEMO)的引导下开展了一系列的远程手术实验。第7次NEEMO项目在美国宝宫瓶实验室开展,它是世界唯一一个永久性的海底实验室。手术采用Computer Motion公司开发的AESOP机器人,机器人由位于距离2500km的加拿大医生控制,机器人端有4名人员(1名具有手术经验的外科医生,1名内科医生没有手术经验,另外2名是潜水员没有任何医疗经验),进行超声波检查,超声波引导肿瘤囊液吸取、血管修复、肾结石的移除、胆囊切除手术过程。第9次NEEMO项目的开展选用由SRI开发的M7机器人(图2d),实验人员不要临时组装与配置机器人并进行实时的腹腔模拟手术,在整个手术中由微波卫星建立通信连接,手术延时达到3s以模拟地球与月球之间的通信。机器人端由4名宇航员辅助远程医生开展手术,进行了重大伤病诊断与骨折外科手术操作。第12次NEEMO项目进行的远程手术由M7机器人和由华盛顿大学等机构开发的Raven I(图2c)执行,M7机器人在此次实验中完成了首次红外线引导的缝合操作。
白Raven I之后,加州大学圣克鲁兹分校与华盛顿大学开发了7套RavenⅡ系统,这7套系统具有开放的软件平台和统一的硬件配置。这些系统将分别装备于美国一些著名的医疗机器人研究机构,如哈佛大学、霍普金斯大学、加州大学伯克利分校等,旨在研究统一软硬件平台下的机器人远程手术,所有软件的开发将采用开源的方式进行。此项目的开展将极大地推进医疗机器人的研究进展。最近加州大学圣克鲁兹分校开发了RavenⅣ机器人,它有4个机械臂和2套摄像头组成,可由不同地方的2名医生合作完成远程手术。
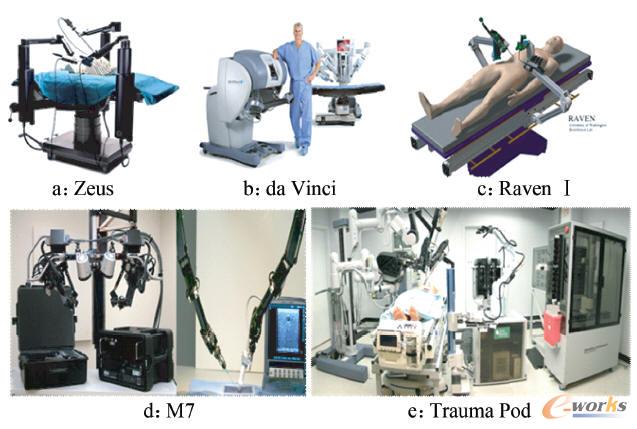
图2 具有远程功能的机器人系统
- 上一篇文章:智能工业工厂生产线无线呼叫管理系统解决方案
- 下一篇文章:机器人手爪的研究现状与进展