



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

机器人手爪的研究现状与进展
2.2 专用手爪的研究进展
在一些特定的应用场合,或是特定产品的工业流水线,研究人员设计了一些构思巧妙的手爪,以提高手爪的抓取效率。由于应用对象专一,这些手爪被称之为专用手爪或夹持器。这些手爪的抓取力量较大,多以两指平行对捏为主,一般具有柔顺的功能,使用的传感器也不多。由于自由度少,结构简单,一些手爪便设计了特殊指面和结构来增强适应物体形状的能力,扩大抓取的范围。下面列举的是一些很有特色的专用手爪:
1997年,日本宇宙事业开发团(NASDA)发射的技术试验卫星ETS-VII(The Engineer Test Satellite),星上搭载一大一小两个机械臂。小机械臂的前端带有三指的多传感器手爪,称为“先进机器人手”(Advanced Robotic Hand,简称ARH),长约0.5m,重约45kg,结构如图16所示。手爪上装有五种传感器,包括一台摄像机、三个接近觉传感器、一对夹持力传感器、一个柔顺传感器和一个力/力矩传感器,具备高度的可靠性和自主能力。手爪能够完成燃料加注、更换电池、浮游物体、螺钉的拧紧和松开等精密抓取和操作任务。
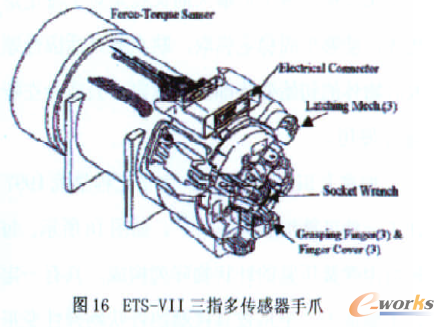
ARH手爪是一只半灵巧(Semidexterous)的手爪,共有3个自由度,由混合手指和柔性指面构成。混合手指包括一个由直流电机驱动的平动手指和两个由步进电机驱动的转动手指,完成基本的目标抓取功能。柔性指面采用了可重构形手爪的类似结构,在手指的表面安装一组弹簧压紧的针状物阵列,这些针状物阵列随着物体的表面起伏,具有较强适应物体形状的能力,并且对物体的约束是形封闭方式,防止物体滑落到空间中去。
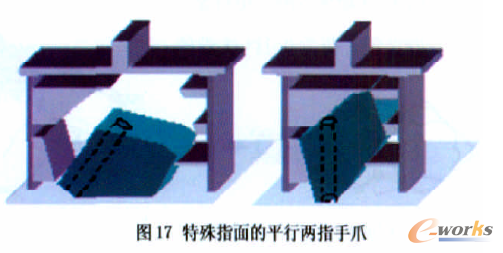
文献研究了一种应用于工业零件抓取的两指平动手爪,手爪指面由梯形模块组成,依靠四个斜面的作用,手爪能够引导零件对齐,调整到需要的方向,做到对抓取零件的线接触最大化,对于特定的光滑零件,能形成抓取方向上的形封闭,对于工业手爪设计具有一定的借鉴作用。图17中是手爪抓取物体时姿态的变化过程。该手爪最大的优点是对于特定形状的物体,能够牢固稳定抓取,缺点就是适应性差,抓取时物体的初始姿势都需要设定,只适合在特定的场合使用。
加拿大Simon Fraser大学工程学院1997年设计了一种可重构形的手爪,如图18所示。每个手指面由弹簧压紧的针状物阵列构成,具有一定的被动柔顺能力。手爪依靠接触的针状物弹性变形,形成可重构形来适应不同形状的物体,利用没有接触的针状物形成部分形封闭,对物体进行约束,抓取的适应性和稳定性好,但当超过弹簧的变形范围时,手爪的适应能力变差,仍然属于专用手爪。尽管手爪的被动适应能力有限,却是提高专用手爪通用性的一种有益尝试。

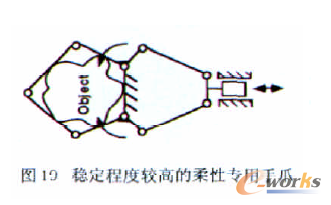
1996年,张玉茹等在文献中设计和分析了一种具有高度稳定性和包络强力抓取能力的专用手爪EPG(Enveloping Power Grasp),如图19所示,并研究了手爪的形封闭稳定抓取。这种手爪采用封闭的五边形连杆作为手爪关节,在抓取平面内物体没有运动的自由度,形成形封闭抓取,抓取的稳定性较高。文中提出了抓取稳定的估算标准,采用图形几何的方法,根据物体的尺寸估算连杆的尺寸,具有一定的柔顺性。尽管如此,手爪对抓取物体的形状和尺寸仍然有很大的限制,只适用于柱状物体等的专用对象。
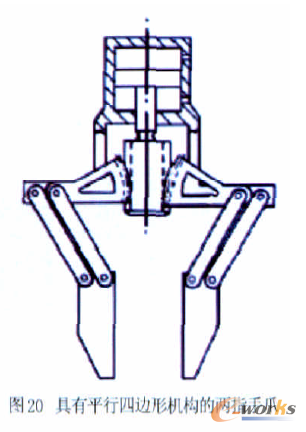
2003年,荷兰Delft大学的A.J.G.Nuttall等研究了图20中专用手爪的柔顺性。该手爪具有较大的抓取范围,能够产生较大的夹持力,通过液压驱动齿条和齿轮,带动两个对称的平行四边形手指机构,产生对捏动作。该手爪的最大特点是通过平行四边形机构,可以使得手指在对捏过程中夹持面和手掌面始终保持垂直,这种结构为我们设计形状自适应手爪的精确捏取机构奠定了基础。
- 第1页:机器人手爪的研究现状与进展(1)
- 第2页:机器人手爪的研究现状与进展(2)
- 第3页:机器人手爪的研究现状与进展(3)
- 第4页:机器人手爪的研究现状与进展(4)
- 第5页:机器人手爪的研究现状与进展(5)
- 第6页:机器人手爪的研究现状与进展(6)
- 第7页:机器人手爪的研究现状与进展(7)
- 上一篇文章:机器人远程手术研究状况与展望
- 下一篇文章:水下机器人发展趋势