



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于手势识别的机器人控制系统
3 手势控制机器人系统设计
图5为手势控制机器人系统的原理图.实验者对摄像头做出动态手势,系统通过上文的手势识别流程识别出相应的手势动作,当符合条件时给无线蓝牙串口写一个数据发送给机器人,机器人接收该串口数据后执行相应的动作指令。
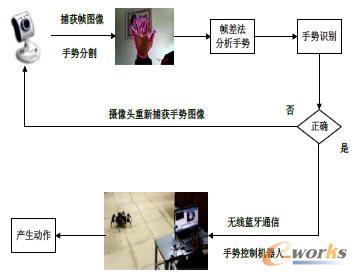
图5 手势控制机器人系统的原理图
在实际设计过程中,机器人若要调整运动方向,必须先停止当前的运动再执行下一次运动,指令如果发错要有纠错的能力,发送指令之间要有一定的时间间隔,以防止控制信息重复多次发送而导致机器人无法正确处理相应信息。
规定当发送前、后、左、右这四种指令时,下一次指令只能发送加速或停止,否则系统自动屏蔽不予发送,Hand和Count值自动清零,重新捕获图像,每个指令发送的时间间隔为三秒钟,三秒以内系统不对捕捉图像进行处理,如此以来,就可保证即使操作者错误发送一些指令信号,系统在识别的过程中也可以予以屏蔽,避免影响机器人正常工作。
表1 手势动作对应串口数据

4 实验结果分析
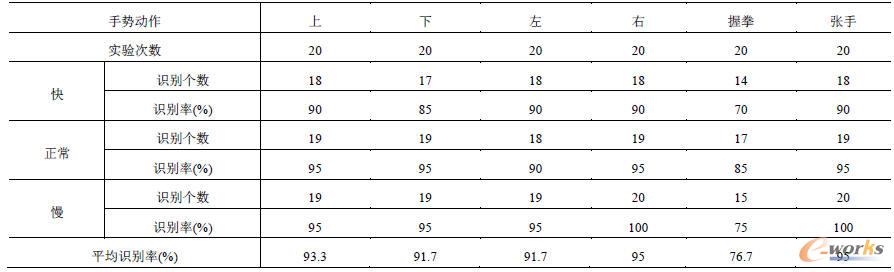
实验者按照较快、正常、较慢这三种速度对每种动作进行了20次测试,实验结果和识别率如表2所示,可以发现手势运动速度的快慢对实验结果并没有太大的影响,除握拳这一手势动作以外,其他动作的平均识别率都能达到90%以上,如果操作者动作更加规范,其识别准确度更高,通过计算其时间复杂度,系统对不同手势动作的平均响应时间小于50ms,具有较高的实时性,可以满足对机器人进行实时控制的要求。
表2 动态手势识别结果
5 总结与展望
基于计算机视觉的手势识别系统对环境较为敏感,手势识别易受到光照亮度、周围环境颜色和人体肤色的影响,从实验结果来看只要在正常光照条件下,周围没有大面积整块的与肤色接近的物体时系统是不会受到太大影响的,当环境背景较为复杂,特别是当手势区域和近似于肤色颜色区域重合时,系统会将手势部分和噪声区域整块的视为一个连通区域而影响手势的识别,如何消除这一点的影响,取得更好的鲁棒性将是我们下一步重点解决的问题。