

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
文章推荐
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于机器视觉的机器人分拣系统的设计与实现
传统的分拣作业一般采用示教或离线编程方式,当工作环境发生改变时系统无法即时的作出
相应的调整,针对传统分拣方式中存在的不足,以并联型机器人和康奈视In-Sight7000型工业智能相机为基拙,搭建一个基于机器视觉的工业机器人分拣系统。该分拣系统结合了并联型机器人和机器视觉两方面的技术优势,对经典的Canny边缘提取算子做出了相应的改进,通过提取图象边缘信息作为匹配的特征,克服了光照变化对视觉系统造成的影响,实现了当分拣对象由传送带运送进入相机视野时,系统可以高速的对分拣对象进行识别和分拣工作。该系统显著提升了机器人对工作环境的适应能力,提高了生产效率和系统柔性。同时,实验结果证明了该系统软硬件设计正确,分拣成功率高。
3.2图像去重复算法
由于要在传送带上分拣数量众多的不同种类物块,为了避免在后续抓取过程中漏抓现象的出现,要保证工件经过相机视野的时间要大于相机的拍照时间间隔,这样就会使同一工件被重复拍摄,因此我们需要设计一种图像去重复算法来使控制器对获取的图像信息进行去重复操作处理,以免在分拣中出现误抓现象。
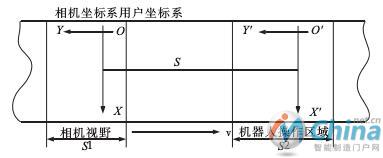
图4 相机视野及机器人操作区域
为了保证带分拣的工件都能够被相机捕捉并被图像处理过程识别出来,传送带的运行速率和相机的拍照频率之间需要满足如下的关系:

通常视觉系统有自己的初始零点,为了方便同机器人末端执行器建立对应关系,为此我们重新建立视觉坐标系和机器人执行区域的用户坐标系,如图4所示。我们记录此时相机视野内的标定板在传送带位置的编码器值a,编码器用于记录传送带位置,且编码器的安装一定要和传送带的滚筒同轴,并保证不出现打滑现象。接下来启动传送带,将标定板运动到并联机器人末端执行机构能够方便到达的区域,固定好后,再记录此时传送带位置的编码器值h。之后,操作机器人建立用户坐标系,要保证用户坐标系的原点坐标及X,Y轴与之前视觉系统在标定板上选取的坐标完全重合。这时,系统就建立起了视觉坐标系和用户坐标系之间的对应关系。
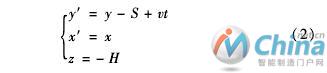
其中,s为b与a的差值。建立好坐标转换关系后,还不能保证机器人末端执行机构可以准确的抓取对象,因为控制器还需要对视觉系统发来的坐标信息进行去重复判定。这里我们使用(t,x)劝坐标来唯一的表示一个工件的坐标信息。
假设相机对某个工件初次采集到的平面坐标信息为(x,y),当前的时刻为t,选取机器人操作区域的用户坐标系中的、轴为参考位置。这样当工件到达该参考位置的时间为tl,tl可以作为后续动态抓取过程的计算参数,减少了计算量。

下一次拍照的时刻t1满足下式关系:
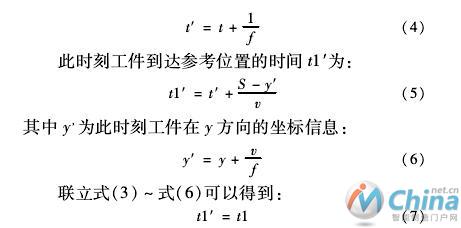
因此对于同一工件来说,其到达前方参考位置的时刻是固定不变的,因此时间坐标可以区分y坐标不同的工件。同时,同一个工件在不同时刻的、坐标是不变的,因此我们可以用(t,x)劝作为一组可以区分图像中各工件的坐标。经采集并去掉重复信息之后的工件信息将按照顺序进行存储,机器人按序进行分拣。
3.3视觉提取过程
视觉系统的最终任务是将分拣对象的位姿信息以及种类信息传递给机器人控制系统,由于本系统面向传送带上平面物体的分拣,因此分拣对象的位姿信息由平面坐标和平面旋转角度构成。图5是基于本实验平台的视觉系统基本的工作流程。

图5 视觉系统工作流程
3.3.1图像采集
图像采集就是将数字图像数据采集到计算机中的过程。本系统采用的是康奈视In-Sight7000型工业相机,利用等时间间隔触发的方式进行图像的采集,每隔一段时间便触发工业相机视野内的物体进行拍照,采集后将数字图像数据交给计算机进行处理。图6为相机视野内采集到的图像。
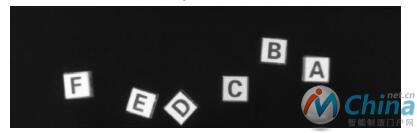
图6 相机采集到的图像
3.3.2图像预处理
为了减少后续算法的复杂度和提高计算机的处理效率,图像的预处理是必不可少的。预处理是图像自动识别系统中非常重要的一步,它的好坏直接影响图像识别的效果。由于工业生产环境经常会受到光照强度、空气中的漂浮物、镜头周围灰尘的影响,采集到的图像往往会包含噪声,因此,本系统中图像预处理的目的就是去除图像中的噪声,得到清晰的图像,以便后续处理过程中提取正确的图像特征。
3.3.3特征提取
在对零件进行识别分类时,特征的提取和选择对系统识别分类的准确性有很大的影响,特征是一个物体能够区别于其他物体所具有的某方面性质的抽象。
边缘信息是图像最重要的特征之一,它对光照等噪声具有较好的适应性。因此针对工业生产环境中光照强度、空气漂浮物及镜头灰尘对生产过程造成的影响,我们采用边缘作为图像的特征,同时,基于边缘特征的模板匹配也减少了计算机需要处理的数据数量。边缘提取的效果直接关系到后续图像处理过程中的分类和识别过程。常见的边缘提取方法主要有Roberts算子、Prewitt算子、Log算子及Canny算子等。其中Canny算子因其具有较好的信噪比、高检测精度以及良好的抗噪效果,在工程应用中被广泛应用。
但是经典的Canny算子也存在一定的不足之处。首先经典的Canny算子采用高斯滤波器对图像进行平滑处理,参数o的选取影响着高斯滤波器的宽度,因此也决定着图像的平滑程度。其次,虽然经典的Canny算子采用高低两个阂值来提取边缘,相比于单阂值的方式虽然更加灵活,但依然存在阂值分割的共性问题,即阂值设置的自适应性问题。高斯滤波器的平滑参数o以及Canny算子高低双阂值的选择很难做到相互兼顾,同时,一组固定的参数也很难满足所有的图像。
针对经典Canny算子存在的不足,我们提出一种改进的Canny边缘检测算子。通过统计学理论分析图像的灰度分布情况,进而判断当前点大致的区域信息,若在边缘附近,则将边缘点邻域内灰度相似的像素点的灰度平均值代替原灰度值;在图像变化平缓的区域,采用高斯滤波器对图像进行噪声的抑制,用这种方式来替代经典Canny算子中的高斯滤波器。同时,为了准确的连接图像的边缘,在对图像进行非极大值抑制后引入最大类间方差}13J法来确定最优的高低阂值,最后可以检测到连续的且含有较少假边缘的图像边缘。图7为改进后的Canny边缘算子与经典的Canny算子比较的结果。
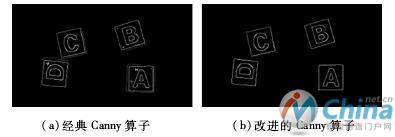
图7 目标对像边缘特征
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:自动化立体仓库主要设备简介
- 下一篇文章:AGV仓储与AGV小车