

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于UG的五轴联动数控加工技术在吹塑模具的应用
五轴联动加工应用越来越广泛,但编程和操作都较复杂。针对饮料瓶吹塑模具的结构参数以及模具的加工精度相关要求,提出在粗、半精与精加工时的多轴加工工艺策略。然后,阐述某一型号的五轴联动机床的后置处理时应进行机床坐标系关系分析,通过机床控制系统生成不同数控程序。最后,对该机床专用后置处理器的开发过程进行详细分析,生成机床所需的NC代码,可实现吹塑模具的加工质量、精度、加工效率大大提高。
3 创建多轴后置处理
3.1 机床坐标系关系分析
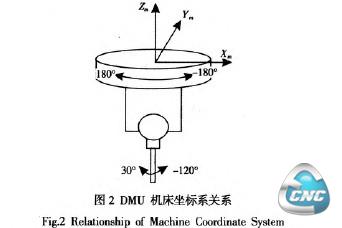
由于五轴加工程序的后置处理应根据不同机床控制系统生成不同数控程序。特别是不同于三轴加工,要对两根旋转轴进行专门定义。DMU60monoBLOCK五轴五联动数控加工中心有X、Y、Z三个直线轴和B、C两个旋转轴。旋转轴c与轴z相连,旋转轴B与轴x相连,C轴回转行程(±180)。,B轴摆动角度(-120)°/+30°。建立机床各轴坐标关系,所图2所示。
3.2 后置处理器的开发
目前,UG后置处理器有二种开发模式:
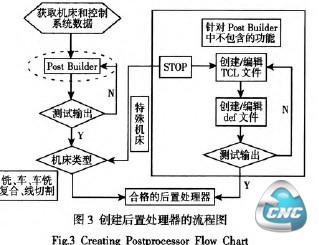
(1)利用UG_POSTBUILD模块,对特定机床的相关参数进行设置,后置处理器创建的流程图,如图3所示。(2)利用相关的VB或VC,根据机床的编程规范及其运动方式,计算出轨迹轮廓点的坐标公式,开发专用机床的后置处理器。
针对DMU-60 MonoBLOCK 5轴联动机床专用的后置处理器开发的相关过程,主要是按第一种方法进行开发。
(1)开发新的后置文件,文件名为:DMU-60MonoBLOCK。确定机床的类型、公/英制、机床的操作系统。
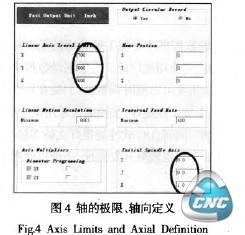
(2)设定轴的极限、轴向定义,如图4所示。
(3)创建设置第四轴(即B轴)参数。最关键的参数是定义日轴行程极限-120°/30°,如图5所示。
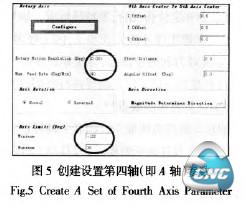
在五轴加工中,B轴的摆动角应该具有相应的极限位置,如果B轴的坐标的插补很大时就可能会使B轴反方向的旋转。而且,在B轴反向旋转时,有可能会导致损伤工件。所以我们常采用法向抬刀方式进行。
- 第1页:基于UG的五轴联动数控加工技术在吹塑模具的应用(1)
- 第2页:创建多轴后置处理
- 第3页:工程应用
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:CNC机床伺服系统中模糊自整定PID控制研究
- 下一篇文章:把握数控系统通讯协议,顺利实施DNC系统