



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于MAS技术的开放式数控系统软件体系结构的研究
3.2 故障诊断学习智能体
故障诊断一直是数控系统设计的核心功能之一,也是最能体现其智能化程度的功能模块。故障诊断学习智能体通过知识库中存储的诊断知识和智能诊断方法对出现的异常故障进行诊断和解释,以确定故障发生的位置和原因。其诊断的效率和质量主要取决于其知识库中知识模型和推理策略的设计。本文采用模糊Petri网(FPN)构建诊断知识库中的知识模型,其异步、并发、模糊性等特征与多智能体技术的要求十分吻合。传统Petri网的推理方法包括矩阵推理法、搜索树遍历法等。本文设计了一种基于FPN的正反双向结合的推理方法,首先通过逆向推理确定与决策目标有关的规则或条件,对FPN进行化简,缩小问题求解空间,然后通过极大代数的矩阵算式实现正向的置信度推理算法。算法流程如图3所示。
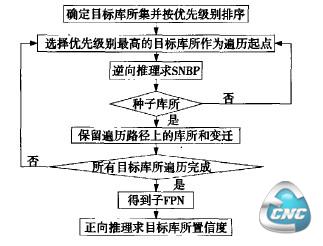
图3故障诊断推理算法流程图
缩小搜索空间将有助于提高搜索速度,对于提高大型知识库处理效率有很好的效果,不仅容易满足实时性的要求,也能满足决策支持的要求。
通过上述步骤完成了知识模型的设计。一个高效的诊断系统不仅需要具备适合的知识模型及推理算法,而且需要在知识库中存储足够的诊断知识。但现实里,任何知识库在初始构建时都不可能涵盖故障诊断过程中所要用到的全部知识,这就需要设计一种学习机制,能够将在生产过程中及诊断过程中发现的新规则以知识模型的形式添加到系统知识库中,完成对知识库的不断更新、完善。故障诊断智能体的诊断流程如图4所示。
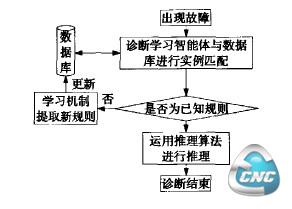
图4诊断知识学习流程图
系统在进行故障诊断的过程中遇到新的故障规则,首先诊断智能体与知识库中的诊断知识进行匹配,如知识库中已包含该规则,则只需按推理算法进行诊断即可,若不包含该规则,则需要通过学习机制进行规则提取,并添加到知识库中进行更新。本文采用基于人工免疫网络理论设计机器学习机制,利用抗原相似浓度算法进行免疫网络中抗体数目的生存,通过训练免疫网络确定相关系数,计算免疫反应能力,最终实现规则的提取和学习。
4 智能体通信机制的研究
多智能体系统研究的核心是一个由自主的智能体组成的群体怎样通过交互作用来解决现实中原本具有分布性的复杂问题。由于问题的分布性和内部相关性,智能体间通信机制的效率将对整个系统的性能产生决定性的影响。因此,通信机制的设计也成为系统构建的核心问题。对智能体问通信机制的设计主要包括智能体间通信模式的选择及通信语言的标准化两个步骤。
4.1 通信模式的选择
智能体之间常用的通信模式包括:
(1)“点对点”的直接通信模式。在这种模式下,智能体之间不管主次、远近都直接进行通信。在由Ⅳ个智能体构成的系统中。每个节点之间需要有上N(N-1)/2个连接,系统复杂度为O(N2)。
(2)“黑板结构”的间接通信模式。称其为间接模式是因为在这种模式下,系统为所有智能体设置一个中间媒介,称为“黑板”区域。其作用是存储共享数据,以实现智能体之间的通信和数据共享。各智能体可以随时访问黑板,而在智能体之间则不存在直接通信。这种通信方式的系统复杂度为O(N)。
上述两种通信方法各有优劣,直接通信的系统复杂度较间接通信高,但其通信可靠性胜于后者。由于本系统采用集中式结构设计,中央管理智能体为整个系统的核心智能体,而其他功能智能体的关系相对模糊。因此单一的通信方式无法满足全部的
系统需求,本文采用“混合式”通信方式,其结构如图5所示。
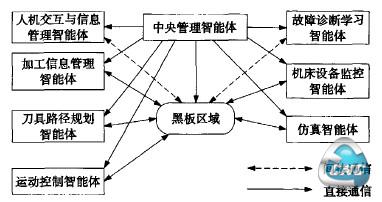
图5“混合式”通信结构
从主次关系出发,中央管理智能体与各功能智能体间采用直接通信模式,以满足中央管理智能体决策的通信可靠性要求。此外系统将为各功能级智能体设立“黑板”区域,采用间接通信模式,由于各功能级智能体问通信频度较高,且资源共享度高,设立资源共享区域将有助于提高通信效率。中央管理智能体可以直接对“黑板”区域进行访问,并对共享内容进行管理。上述步骤完成了对智能体通信机制中通信结构的设计,下面阐述如何对通信语言进行标准化封装。
- 上一篇文章:NC数控编程与绿色节能制造研究
- 下一篇文章:数控切割自动套料软件中实现特殊切割工艺的一种方法