

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

开放式数控系统样条曲线运动规划探讨
样条方法应用于复杂曲线加工时存在拟合精度高,NC程序小,可以有效地避免小线段方法在实际加工中可能造成的数据饥荒的优点,本文对基于样条曲线的运动规划方法进行了研究,给出了三次参数化样条曲线运动规划方法。
4 三次参数样条运动规划方法的实现
在参数三次样条运动规划方法的实现中定义了如下C结构体来描述两个型值点之间的三次样条曲线:
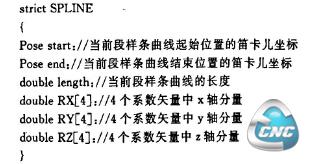
由于在三次样条曲线的构造过程中,要求解,t+1维线性方程组来确定各段三次样条的系数,这个过程中包含大量的浮点运算,使算法的实时性难以得到保证。因此,在三次样条曲线运动规划方法实现中,应该引入了一个三次样条运动规划预处理指令,通过该指令,把计算量较大、实时性要求不高的工作,如计算出各轴的三次曲线参数方程的系数及三次样条的长度等放在预处理阶段完成。当预处理结束时,才开始三次样条曲线的实时插补,参数化三次样条实时插补算法流程如图1。在非实时仿真环境下对表1给出的型值点对应的C样条曲线进行了规划测试,参数配置如下:amax=1000m/s2;v=150mm/min;vmax=6000mm/min;cycleTime=0.002s。其中,amax为最大加速度,、为指定的编程速度,vmax系统的轴最大速度,cycleTime为插补周期。

图1 三次样条实时插补算法流程
由测试可知(曲线图略,可以根据值点列表对应得出),基于样条曲线的运动规划方法也可以在数控的运动控制器中实现。

本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:开放式数控系统中运动控制卡的设计
- 下一篇文章:浅谈华中数控系统连接与参数设置