

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种智能双模数控伺服进给控制器设计
以数控伺服进给控制器为研究对象,采用在全论域范围内带有自调整模糊规则因子和模糊比例因子的自适应控制策略,提出一种可提高数控伺服进给系统动态性能的智能Fuzzy PID双模控制器设计方法。仿真分析证明该方法在不同的工作状态下,根据不同的响应阶段的动态性能要求在线自动调整控制器的控制参数和控制算法,可有效地克服传统控制算法存在的扰动、超调量大、调节时间长等缺点。Matlab软件仿真证明该控制器较常规PID、模糊控制器具有响应快、超调小、鲁棒性强和自寻优等特点。
2.2 控制规则的无触点“软切换”
智能双模控制器采用基于模糊规则的“软切换”原理进行,控制器的控制算法由如下的“模糊控制规则”进行切换:
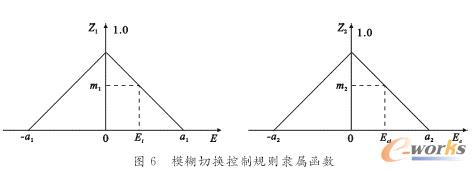
通过改变模糊切换规则的隶属度函数的形状和ai(i=1,2)的值可以获得不同的控制强度分量。当输入误差和误差变化量分别为Ei和Eci时,通过图6的模糊切换控制规则隶属函数对应得到m1 和m2,与(and)运算方式采用取小运算。
3 仿真分析
利用Matlab仿真软件对图1所示的典型数控伺服进给系统在不同控制方法下进行仿真,得到的阶跃响应曲线如图7所示,其控制性能指标如表3所示。
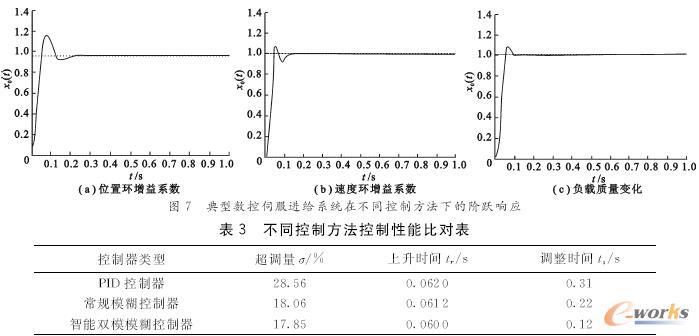
由表3可以看出:当系统参数发生变化时,PID控制器所对应的响应曲线变化最大,常规模糊控制器对应的响应变化较小,基于自调整模糊比例因子、规则因子智能双模控制器对应的响应变化最小。这表明PID控制器、常规模糊控制器、自适应模糊控制器的鲁棒性依次增强。

4 结 论
(1)针对伺服进给系统的复杂性、非线性以及模型不确定性的特点,设计出的Self adaptiveFUZZYPID智能双模控制器能根据伺服进给系统在不同的响应阶段和性能指标,自动调整控制参数,自动切换控制算法,以适应数控进给伺服系统在不同的工作状态下的动态性能要求。
(2)模糊无触点“软切换”功能避免了一般双模控制算法在控制方式切换时存在的扰动、超调量增大、调节时间长等缺点,实现了控制方式的平稳过渡。
(3)仿真试验表明,所设计的Self adaptiveFUZZYPID智能双模控制器具有动态响应快、控制精度高等特点,提高了系统的动、静态特性,是一种提高控制性能的有效方法。
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。