投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种智能双模数控伺服进给控制器设计
2 智能双模数控伺服进给控制器设计
由于影响进给伺服系统性能的主要因素具有时变性和不确定性,在综合自适应控制模糊控制和常规PID控制算法优点的基础上,设计了图4所示的Self adaptiveFUZZYPID智能双模控制器,其工作原理如下:在大误差范围内采用基于自调整模糊比例因子和规则因子的Self adaptiveFUZZY 控制器进行调整,实现系统响应的快速性和稳定性;小误差范围采用传统线性PID控制器进行调整来消除系统的余差。两种控制方式的切换采用“无触点”模糊切换开关进行。
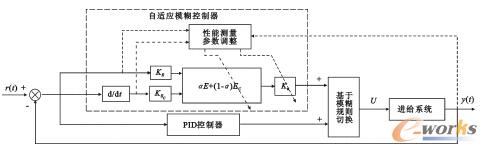
图4 智能双模控制器的控制原理图
2.1 自适应模糊控制器设计
图4中的自适应模糊控制器选用基于自调整模糊比例因子和规则因子的自适应模糊控制器,该控制器依据伺服系统动态性能指标上升时间T、超调量Y调整比例因子Ku,依据伺服系统的误差E、误差变化EC在线自调整规则因子α。
2.1.1 基于性能指标的自调整比例因子确定
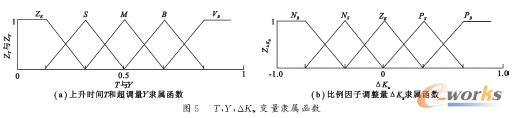
对于数控进给伺服系统而言,较为重要的性能指标是系统响应是否迅速、准确和有超调,因此选取在线测量上升时间、稳态误差和超调量,据此来调整比例因子。该调整过程由一个模糊控制器来实现,输入为系统响应上升时间T和超调量Y,输出为比例因子调整量ΔKu。各变量语言值模糊子集定义为

如图5所示,上升时间T和超调量Y的隶属函数均为对称三角形均匀分布,论域为[0,1];比例因子调整量ΔKu采用了三角形对称分布,论域为[-1,1]。
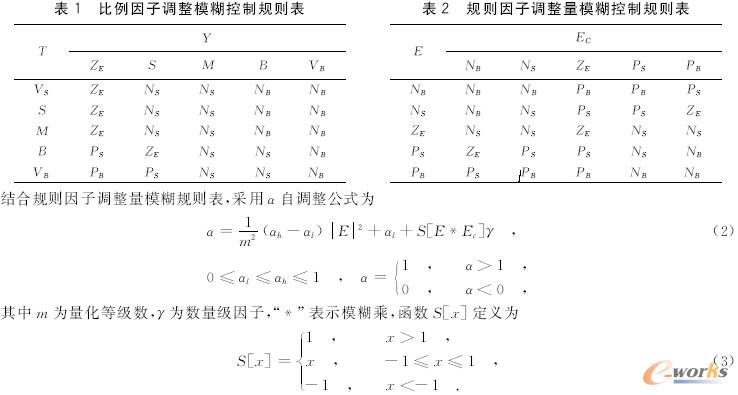
根据系统控制要求,选取比例因子调整量ΔKu模糊控制规则如表1所示。在第犖个控制周期,控制器根据上升时间T、超调量Y按模糊控制规则得到比例因子调整量ΔKu,对调整比例因子Ku进行修正:

2.1.2 基于改进的全论域的自调整规则因子确定
为获得更好的系统动态性能实时性,采用在每个采样周期根据误差犈和误差变化犈犆的大小及关系对规则因子α进行调整,将E,Ec和α的调整量均模糊化为{NB,NS,ZE,PS,PB},选取α调整量模糊控制规则如表2所示。