

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控技术在磁轴承应用中的研究
本文介绍磁悬浮主轴系统的组成及工作原理,提出了一种在常规PID基础上的智能PID控制器的新型数字控制器设计。其核心部件是TI公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。用C2000作为开发平台,设计在常规PID基础上的智能PID控制器。理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。
5 软件设计
作为一个系统,它的软件包括系统初始化、控制算法和特殊情况(如掉电、溢出等)处理。TMS320LF2407A是基于C2000的开发环境,可以用汇编语言和C语言进行开发。C语言具有开发周期短、可读性和可移植性强,但执行效率低、故障自诊断能力弱。而汇编语言执行效率高,但指令多,编写繁琐,掌握不易。因此一般情况下,调用频繁部分(如:中断部分和初始化部分)用汇编语言,控制算法采用C语言编写以降低程序的复杂度并提高它的可修改性。控制算法采用传统PID基础上的专家PID控制。传统PID控制采用微分先行的实际微分PID,结构如图5所示。
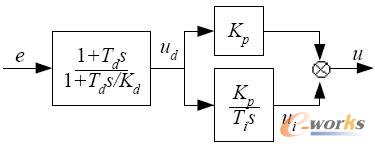
图5 微分先行的实际微分PID
本文的系统软件编写采用汇编语言和C语言两种语言混合编写。系统软件的关键部分就是控制算法的编写。在编写控制算法前通过对具体的磁悬浮主轴系统的模型进行稳定性分析并仿真找到它的最优控制的PID的Kp,Ki,Kd三个参数。并根据以前的模拟控制和数字控制的经验来确定e,&与Kp,Ki,Kd所对应的模糊集。具体的软件编辑框图如图6。其中EV为事件管理器,N为具体的磁悬浮主轴系统所对应的最大控制量。
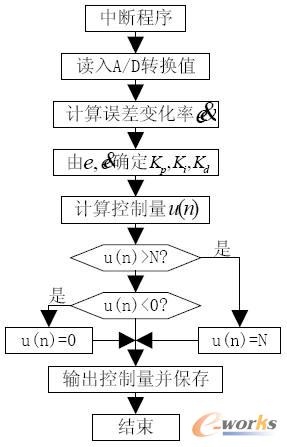
图6 软件框图
6 结 论
通过传统PID控制器和智能PID控制器在单自由度中仿真结果进行分析比较,得到智能PID控制器的控制效果优于传统PID控制器,主要体现在从起浮到平衡所需时间短,控制精度高,抗干扰能力强。
- 第1页:数控技术在磁轴承应用中的研究(1)
- 第2页: PID控制器及其智能化方法
- 第3页:软件设计
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:螺旋桨加工的数控技术研究
- 下一篇文章:数控机床的准闭环控制数控技术