

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控技术在磁轴承应用中的研究
本文介绍磁悬浮主轴系统的组成及工作原理,提出了一种在常规PID基础上的智能PID控制器的新型数字控制器设计。其核心部件是TI公司的TMS320LF2407A,设计了五自由度磁悬浮主轴系统的硬件总体框图。用C2000作为开发平台,设计在常规PID基础上的智能PID控制器。理论分析结果表明:这种智能PID控制器能实现更好控制效果,达到更高的控制精度要求。
3 PID控制器及其智能化方法
3.1 常规PID控制器
为了比较,有必要在此回顾一下传统的PID控制器。
众所周知,常规PID控制是建立在具有精确的数学模型的基础上的。它具有结构简单、稳定性能好、可靠性等优点。在当代的控制领域,PID控制在控制领域中占有非常大的比重。设计它的关键是PID参数的整定问题。但在现实的控制中,其过程非常复杂,在某时刻具有高度非线性、时变不确定性、滞后性等。在外界干扰、负载扰动等因素的影响下,其参数甚至数学模型都会发生改变,这时,常规PID显然不能满足那些高精度控制的要求。如果能实时调整PID的参数的话,这样肯定可以满足要求。这种PID就是智能PID。
3.2 智能PID控制器
随着近几十年智能控制理论的快速发展,以及不断应用到实践中,目前应用最为活跃的智能控制包括:模糊控制、神经网络控制和专家控制。人们逐渐把智能控制的思想应用到常规PID中,形成多种形式的智能PID控制。它兼具有智能控制和传统PID两者优点,如:智能控制中的自动整定控制参数能很好地适应控制过程中参数变化和传统PID控制的结构简单、可靠性高等,已为人们所熟知。正是基于这两大优点,智能PID控制为许多控制过程所采用。智能PID控制器又可以分为:基于神经网络的PID控制器、模糊PID控制器、专家PID控制器等多种。
3.3 专家PID控制器
专家PID控制器原理图如图3所示。它是传统PID算法的基础上,增加了误差e和误差变化率&,查Fuzzy矩阵集、知识库,通过知识判断来确定是否要调整及怎样调整PID的三个参数Kp,Ki,Kd。显然它是可以根据专家知识和经验实时调整PID的三个参数,具有很好的控制性和鲁棒性。本文就这类控制器的设计进行简单的阐述。
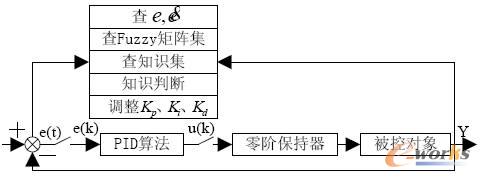
图3 专家PID控制器原理图
4 硬件设计
考虑到磁悬浮主轴系统的特点,同时也为了使其优点能得到充分的发挥,数字控制器采用DSP作为核心部件。综合考虑TI公司的各款DSP芯片的性能和集成在芯片内的模块,选用TI公司专门用于工业控制TMS320LF2407A作为核心部件。
TI公司的TMS320LF2407A芯片具有以下特性:(一)可以采用内部工作频率20MHz,也可以外加工作频率,最大为40MHz,本文晶振采用15MHz,经陪频后作为其工作频率30MHz。(二)该芯片集成了2个8选1的10位A/D转换器,共16路。(三)自带16K Flash ROM和544字数据存储器。(四)具有12路PWM输出。(五)集成了Watchdog、PLL时钟、EV事件管理器等电路。由于该芯片集成这些在控制中非常有用的电路,这就一方面减小了硬件设计难度和体积,另一方面提高了系统的可靠性。
电涡流位移传感器的输出范围一般都比较宽,大概为0~-24V,而TMS320LF2407A芯片中集成的A/D转换器的范围为0~+5V(原因:DSP只能处理0~+5V之间的信号),因此须加一电平转换电路。转换原理:因为传感器分辨率决定了磁轴承系统的最小控制精度,所以电平转换电路必须保证分辨率的情况下进行,即保证-14.5~-9.5V之间的电压不变,其余按最大化处理。
图4是五自由度磁悬浮主轴系统的硬件设计框图。
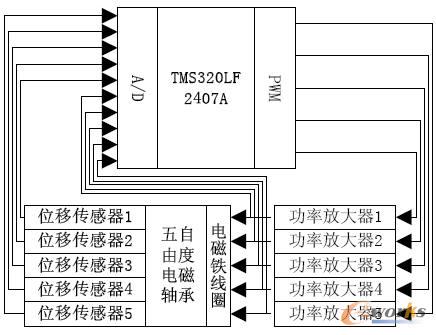
图4五自由度磁轴承系统总体框图
- 第1页:数控技术在磁轴承应用中的研究(1)
- 第2页: PID控制器及其智能化方法
- 第3页:软件设计
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:螺旋桨加工的数控技术研究
- 下一篇文章:数控机床的准闭环控制数控技术