



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于LMD18245型驱动器的二相步进电机细分驱动器设计
2 驱动系统设计
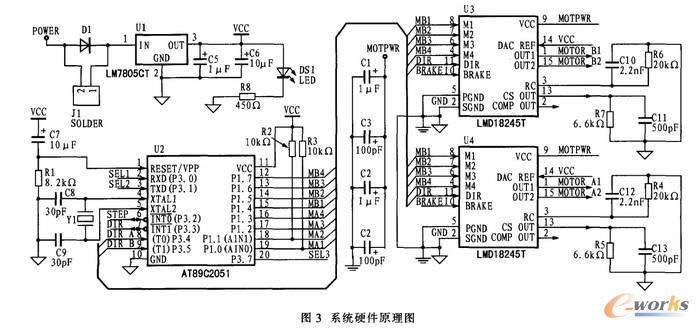
通过以下不同组合方式配置M4-M1端口,LMD18245可以工作在单相运行全步、双相运行全步、不加转矩补偿的半步驱动、加转矩补偿的半步驱动、1/4细分驱动、1/8细分驱动、1/10细分驱动、1/16细分驱动等驱动方式下。不同驱动方式下。不同驱动方式可以通过调整外部跳线实现,也可以通过在线编程软件实现。这里介绍最常用的,性能较好的10细分驱动的原理及应用,系统原理图如图3所示。该电路主要由一个AT80C2051和二个LMD18245及外围电路组成。
2.1 系统供电
系统由二路电源供电,一路采用8~12V DC给LM7805供电,输出5V标准电压,作为系统的信号电源;由于LM18235F型驱动器的额定输入电压最大值为55V DC,因此,当使用超过45V DC的电源时,将会产生由电机减速所带来的反电动势,可能会使供电电压增加并超出55V额定电压的限制。为加强保护,可放置一个适当的齐纳二极管将电压限制在55V以下,也可在电机供电端接入一个低于2.5A的保险丝。由此可见,用一个标准24V交流变压器即可,因为经过二极管整流和电容器滤波可以产生接近35V DC的电压来实现电源供电。该系统采用未稳压的线性电源。而如果采用开关电源,则要在输出端放置一个大电容器(10000μF或更大)。
2.2 步进/方向连接
AT89C2051的(T0)P3.4和(T1)P3.5口均定义为GPIO口并分别接二个驱动器的DIR输入端,P3.4和P3.5的输出由程序控制。步进电机的实际运转方向通过改变INT1(P3.3)输入电平来实现,INT0(P3.2)作为步进脉冲输入口,步进和方向信号均设置为“低有效”,它们和BREAK信号均来自上位机,有时可能需要光电隔离,并且引脚脉宽至少应为2ms。该系统的最大步进频率为45kHz,在1/8细分驱动模式下,1.8o步矩角的步进电机转速可以接近1700rpm。
2.3 BRAKE的连接
LMD18245驱动器的一个设计特点是具有BRAKE(刹车)引脚,是用来关断步进电机的电源。
该引脚为逻辑高电平时会使能刹车并制动步进电机。正常操作时,BRAKE引脚为低电平或接地。在该系统中,BRAKE引脚接收上位机的信号来实现电机的实时关断。
2.4 限流电阻的设置
LMDl8245驱动步进电机的电流达到3A/相.最大驱动电流输出由电阻器R5和R7设置。电流检测电阻可以采用以下公式计算:R=20000/A(其中R的单位是欧姆,A的单位为安培)。电阻器。R5和R7的典型值如表1所示,要求使用l/4W电阻并且阻值不能低于6.6kΩ。二个LMDl8245型驱动器必须设置为相同的电流输出门限,R5和R7采用相同的阻值。不要使驱动器的输出超过3A,否则将会出现问题。若要灵活改变电流输出,可以采用两个最大阻值为25kΩ的可变电阻器分别替换R5和R7,但为安全起见,还是建议采用R5和R7。
2.5 驱动方式选择
在不同的步进阶段给LMDl8245的M4-M1端口加载一定序列的二进制数可以非常容易地实现二相步进电机全步驱动、半步驱动、1/4细分驱动、1/8细分驱动、l/10细分驱动和l/16细分驱动等驱动方式,可以设置外部的跳线开关给SELl、SEL2、SEL3端口加载不同的值并通过相应的软件确定具体以何种方式驱动步进电机。
3 驱动系统软件设计
该系统采用AT89C2051作为主控制器,其指令系统与5l指令集完全兼容。根据二相双极型步进电机均匀细分时的电流变化规律公式:IA=Im-cosθ,IB=Imsinθ,可以计算出1/10细分驱动时电机中的相电流比及其对应的M4一Ml上的二进制等量数值。将该等量数值用数组表示为:
PDAC [40] =fob000011 11,0b001011 11,0bolollll O,0b01111101,…,0b00101111};

由此得出二相步进电机驱动控制软件流程如图4所示,其中初始化设置要定义各端口的功能,设置INT0为边沿触发,其余均为GPIO口:初始化电机主要是运行前设置端口的I/O方向,确定所选择的细分驱动方式,关断所有线圈电源并记录正确的步进位置;在中断服务程序中判断步进方向并计算步进位置,根据步进位置在数组PDAC[401]及:PDIR[40]中选取正确的值送到AT89c2051的P1和P3口完成一个微步进过程;最后由用户中止程序运行。

4 结束语
笔者设计的二相步进电机细分驱动器在低头数电脑绣花机中得到较好的应用,工作过程中运转噪声低、运行平稳、控制性能较好、使用方便、整机设计简洁、价格低廉,是一种性价较高的二相步进电机驱动器。
- 上一篇文章:双焊枪自动焊接机数控系统设计
- 下一篇文章:PLC在多工位自动装配机中的应用