



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

台达六轴数控系统和交流伺服在工业机械手臂上的应用
三、方案功能的实现
1.控制系统6AXIS+1 AXIS的架构
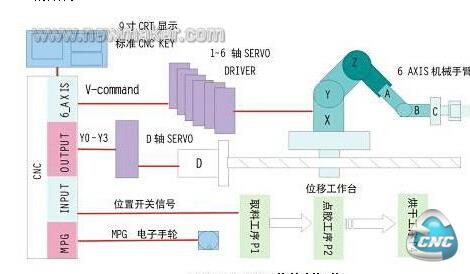
2.硬件的组成和6+1的设计架构实现
控制系统的硬件部分主要有CNC数控系统、伺服系统和其他辅助元件三部分组成。
(1)CNC数控系统
数控系统选用中达六轴数控系统,它是机械手臂的控制中心,除具有线性插补等运动控制外,还能够进行画面显示、参数设定、程序编辑、PLC逻辑控制等。
(2)伺服系统
伺服系统选用7套台达-A系列交流伺服驱动器和电机。其中ASDA 3kW*1台、用于独立控制机械D轴位移工作台,拖动机械手臂前后运动,使其能自由移动到生产线的任何地方。其伺服控制模式采用台达交流伺服独有的PR控制模式。
它的命令来源为台达交流伺服位置指令寄存器8组内部位置指令(参数P1-15~P1-30设定),伺服电机运转的速度则由参数P1-36~P1-43设定。
通过数控系统I/O输出OUTPUT点Y0-Y3,配合伺服CN1接口的I/O,POS0~POS2与GTRG,就可以选择8组中的一组来当成位置指令来源。当伺服CTRG信号上升沿触发后,伺服电机便会向给定目标运动。
其余6台伺服分别为:ASDA 2kW*1台,控制机械手臂X轴空间移动;ASDA 1kW*2台,控制机械手臂Y、Z轴的空间移动;ASDA 200W*2 台,控制机械手臂A、B轴的空间移动;ASDA 100kW*1台,控制机械手臂C轴的空间移动。
这六台伺服采用的是速度控制模式,数控系统的伺服轴口输出 +/-10V的模拟量电压来控制伺服电机旋转,并实时通过伺服驱动器的PG分周比输出OA/OB/OZ信号将伺服运动状态反馈给数控系统,来实现半闭环控制的目的,来保证机械手臂的运动精度。
(3)其他辅助元件
其他辅助元件主要有:
电子脉冲发生器(MPG手摇轮),规格DC5V,在手动和教导模式下,产生脉冲信号控制伺服轴位移。
动力变压器,规格7.5kVA三相380V/三相220V,作用是给伺服系统提供动力电源。
控制变压器,规格500VA,AC380V/AC220V,作用是给数控和伺服系统提供控制电源。
开关电源,规格500VA,DC24V,AC220V/DC24V,作用是给控制回路提供直流控制电源。
INPUT输入板,规格NPN型,可以连接按钮、行程开关、继电器触点等传感器信号。
OUTPUT输出板,规格NPN型,作用是控制中间继电器、微型电磁阀等DC24V负载。
中间继电器,规格DC24V,增加OUTPUT输出板的容量,线路保护。
气动电磁阀,规格DC24V,控制机械手夹紧气缸和生产线其他辅助动作。
按钮、开关若干,提供各种传感信号。
通过上述硬件配置和架构设计,中达电通六轴数控系统便能够通过速度模拟量电压命令和外部的I/O输出信号来控制一个六轴的机械手臂和一个独立的位移工作台运动了。
- 上一篇文章:碳纤维复合材料制件手工钻孔数控加工技术
- 下一篇文章:西门子840D数控系统常用维修方法