



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于PLC的架车机电气控制系统设计
2 架车机电气控制系统软件设计
2.1 软件功能分析
PLC同步控制程序实现的功能需符合2000年铁道部颁发的中华人民共和国TB/T1686—2000行业标准,即需要有高度显示、两杆超差过大自动调整、托头超过极限位置自动报警等功能。
架车机电气控制系统的高度显示通过威纶MT6070ik型触摸式文本控制器显示,同步功能通过同步控制程序实现,报警通过蜂鸣器报警以及文本控制器提示两者结合实现。其功能流程图见图4。
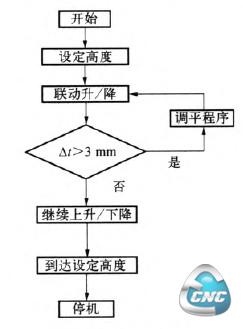
图4功能漉程圈
2.2 软件设计
2.2.1 PLC部分程序编写
系统通过梯形图来编写PLC程序,其本质与其他语言相同,即通过一定的逻辑语句与关系来实现预定的功能。图5表示架车机同步控制程序中高度数据采集部分的梯形图。
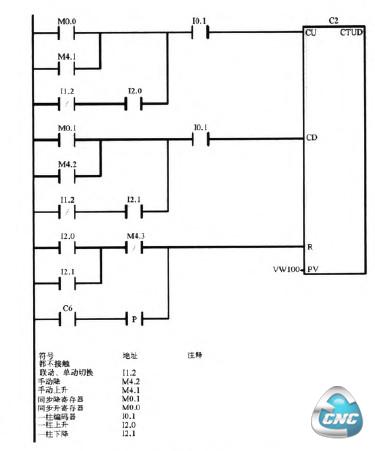
图5 高度数据采集梯形图
在程序实现计数功能之前,需对PLC的扫描周期与编码器反馈的脉冲周期进行比较。若PLC的扫描周期大于编码器的脉冲周期需采用高速计数器。
架车机使用鼠笼三相异步电机,额定转速为Ne=1 440 r/min,额定功率为Pe=4 kW;减速器减速比为n=71;丝杠升程为h=12 mm/r;编码器每转脉冲120个。

2.2.2 文本控制器界面设计
控制界面主要包括高度柱状图显示模块,设定高度模块以及报警显示模块。该控制界面采用与威纶MT60TOik配套使用的EB8000 Project Manager软件进行开发,EB8000具有丰富的模块,支持多类型PLC的通信,兼容性好。
控制界面的系统结构见图6。操作界面采用的是17.78cm(7 in)触摸屏,柱状图显示清晰,高度设定方便可靠,报警即时有效。

3 结束语
通过在机务段的实际使用,表明该型架机车使用性能完全满足机车检修与组装的使用需求;其稳定的性能、可靠精度、友好操作极大方便来操作人员的使用,降低劳动成本,提高工作效率,具有一定推广意义。
- 上一篇文章:当下数控技术专业教学存在的问题
- 下一篇文章:数控技术专业教学方法和手段的改革