

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

五轴联动虚拟电火花成形加工机床设计与应用
本文对复杂曲面电火花加工,建立了虚拟电火花成形加工机床。该虚拟机床在运动部件之间建立约束关系。采用组件矩阵变换技术对主动部件的位姿矩阵进行变换;采用软件插补技术对加工路径进行插补运算,驱动虚拟坐标轴运动,并在电极与工件之间作交割运算,去除工件材料。利用它可以解决复杂曲面的加工难题,提高工作效率。
2.4 装配模型数据结构
为了操纵装配模型中的部件运动,需建立一个与装配几何模型相一致的虚拟装配数据模型,用该数据模型把装配模型的相关信息加载到建立的数据模型中,实现位姿矩阵的变换运算、数据存储。本系统建立的虚拟装配数据模型的数据结构为:

在数据模型中,MC_Movement为运动节点,它承载了部件的动态特性。EDM_Component为部件节点,它承载了部件的静态特性,如部件的名称属性、在装配空间中的位置属性,与其它相邻部件的关系属性等。
3 虚拟机床驱动与加工模拟
3.1 运动部件的位姿
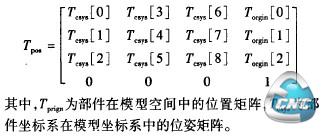
位姿是装配部件在参考坐标系的位置和姿态的统称。通常机床的运动包括直线移动、旋转运动,为了实现对机床运动部件的驱动,必须确定运动部件在装配空间的位姿。为了表示部件在装配空间的位置,需要用两个坐标系,即装配空间坐标系与部件本身坐标系。当部件在空间做运动时,可以描述为部件在装配空间内的移动和部件绕本身坐标系的转动。为此,装配模型要驱动部件,先要获取移动组件的标识与它的位姿矩阵,包括x、y、Z轴的i、j、k分量以及部件的本身坐标系在装配空间中X、y、Z分量,运动部件的位姿矩阵一般表示为:
3.2 运动矩阵变换
矩阵变换是实现各坐标轴移动和旋转的基础,其矩阵根据计算的直线位移量或旋转角度进行组合。利用变换矩阵对原位姿矩阵进行变换首先对变换的矩阵进行组合,部件的变换所需的参数用矩阵表示为:
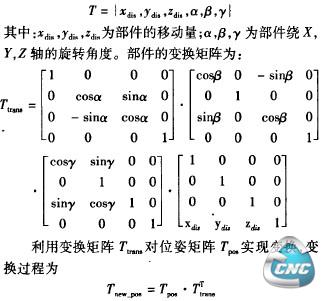
通过以上变换得到新的位姿矩阵。新的位置矩阵得到后,在装配模型中更新部件的位姿矩阵,再利用定位函数使部件在装配模型空间中移动到新的位置。
- 第1页:五轴联动虚拟电火花成形加工机床设计与应用(1)
- 第2页:装配模型数据结构
- 第3页:运动轴驱动
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:西门子数控系统 创新发展之路
- 下一篇文章:数控技术专业理论教学方法