



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于虚拟样机的数控铣床伺服控制系统
4 基于ADAMS和MATLAB的伺服控制系统联合仿真
ADAMS与MATLAB的联合控制是在ADAMS中建立机械运动部分的虚拟样机,然后由ADAMS输出描述系统方程的有关参数,再在MATLAB中读入ADAMS输出的信息并建立起控制方案,在仿真计算过程中,ADAMS与MATLAB进行数据交换,由ADAMS的求解器求解系统的方程,由MATLAB求解控制方程。
建立联合仿真的主要步骤:(1)在ADAMS打开数控铣床的虚拟样机模型;(2)确定输入与输出变量,输入变量是控制力矩变量torque,用于接受控制系统传递过来的ADAMS的输入信号,即控制系统的输出信号,输出变量是X方向丝杠的角速度velocity,用于给控制系统输入实时的速度信号,同时反馈给控制系统;(3)加载ADAMS/Controls模块,导出控制参数torque和veloc。畸,构建的模型已经成功地转为MATLAB可以读取的形式,ADAMS/Control将输入和输出信息保存在m文件(Matlab程序)中,同时产生一个模型文件(。a如),一个命令文件(。cmd),供联合仿真分析时使用; (4)启动M舭B程序,将MATLAB的工作目录指向ADAMS的工作目录,并对在MATLAB/Simulink中显示的adams sub模块进行设置;(5)在MATLAB中建立控制方案,如图8所示;(6)通过仿真计算,分别得到在MATLAB仿真结果(图9)和ADAMS中的仿真结果(图10)。
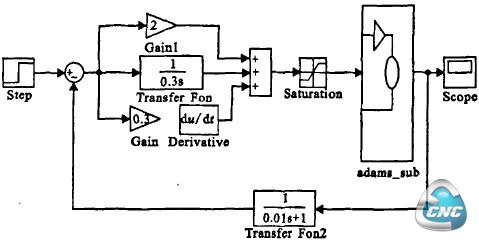
图8联合仿真控制方案
图9 MATLAB仿真结果
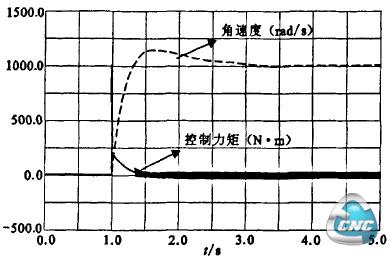
图10 ADAMS仿真结果
从联合仿真结果可以看出,系统具有很好的稳定性,今后的工作除了进一步完善数控铣床的虚拟样机模型外,重点研究虚拟样机的参数化,使得虚拟样机性能能够真正的接近实际物理样机,能够更方便的考导轨摩擦,热变形和主轴的高速切削的影响,在这个基础上对虚拟样机同时实施X,y,Z 3个方向控制就会得到更加满意的效果。
5 结论
(1) 将复杂的控制系统添加到机械系统样机模型中,然后对机电一体化系统进行联合分析。
(2) 可直接利用ADAMS程序建立控制系统分析中的机械系统仿真模型,无需进行数学公式建模。
(3) 可以使机械设计师和控制工程师共享一个虚拟样机模型进行同样的设计验证和实验,使机械系统设计和控制系统设计能够协调一致,并同步进行修正以达到机电一体化最佳化设计。
- 上一篇文章:数控技术在大飞机研制生产中的应用
- 下一篇文章:数控技术在模具工作零件制造过程中的应用