



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于虚拟样机的数控铣床伺服控制系统
2 基于ADAMS/View的伺服控制系统仿真
ADAMS控制系统设计是ADAMS软件对复杂的机械系统进行建模和仿真分析的基本环节之一。针对一般的控制环节可以用ADAMS/View提供的控制工具箱Controls Toolkit进行处理,直接在ADAMS/View样机模型中添加控制模块,完成机电一体化系统的仿真分析。
在ADAMS/View中建立的工作台速度控制系统,是以x向丝杠的角速度作为控制对象,将给定的角速度与实际角速度进行比较,产生的速度偏差通过控制模块与丝杠上的控制力矩进行关联,从而控制虚拟样机中丝杠的实际转速,并通过反馈环节与给定转速不断地进行比较,最终使丝杠的转速达到给定转速,ADAMS/View中的控制原理如图3所示。
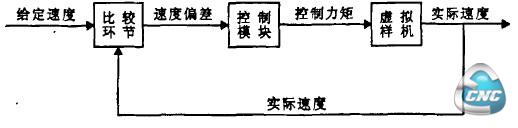
图3 ADAMS/View中的控制原理框图
在ADAMS/View中建立的工作台速度控制系统的主要步骤:(1)打开模型,在x向丝杠上添加控制力矩Contr01。torque;2)在Conlzols Toolkit中建立输入环节,包括给定速度input—vdesired和丝杠实际角速度为input—vactual,因为给定的伺服电机转速是3000f/rain,转化为角度则给定速度为18 ooo(。)Is,转化为弧度为314 rad/s;(3)建立比较环节;(4)建立增益环节;(5)关联力矩;(6)进行仿真,将仿真时间设置为5s,仿真步数为50步,ADAMS/View中的速度仿真结果如图4所示。
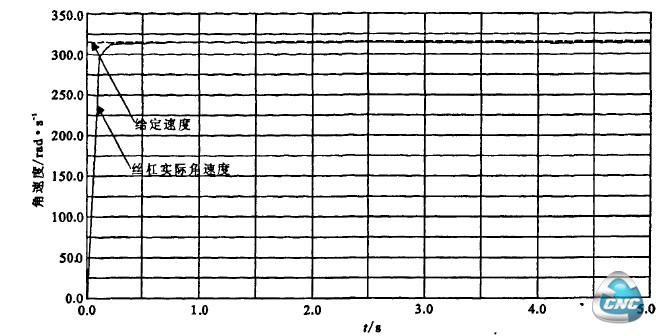
图4 ADAMS/View中的速度仿真图
3 基于MATLAB的伺服控制系统仿真
MATLAB的Simulink 3工具箱是以控制系统的传递函数为基础进行计算机仿真的工具。Simulink具有模块化、可封装、可重载、面向结构图编程以及高度可视化等优点,可大大提高系统仿真的效率和可靠性。Simulink含有Sinks(输出方式)、Source(输入源)、接受器、Connections(连接与接口)线性和非线性组件等子模块库。每个字模块库又含有相应的功能模块,可以方便地创建自己的模块。定义完一个模型以后,就可以通过Simulink的菜单或者在MATLAB的命令窗口输入命令对它进行仿真。
工作台伺服系统是由驱动模块与伺服电动机等组成的一个高精度角度闭环随动系统,其输入为数控系统给出的指令脉冲,输出为电动机转角。在以光栅、脉冲编码器等组成检测反馈环节所实现的闭环控制下,电动机的转角将跟随数控指令变化。通过高精度的精密丝杠螺母副传动,电动机的角位移被转化为所需的工作台的直线位移。控制系统原理框如图5所示。采用半闭环控制,在伺服电机上加检测元件,检测电机的速度和位移。在精度要求不是很高的条件下,不用对电流进行反馈,直接是一单闭环调速系统,可以外加一个位置环,但本文只对速度控制系统进行了研究。
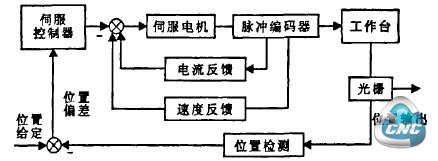
图5数控铣床伺服控制系统原理框图
利用MATLAB对Y向工作台的伺服控制系统进行仿真时,首先要对Y向工作台建立数学模型,用能量守恒的方法将负载的转动惯量等效到电机轴侧,(1/2)Jew21=(1/2)Jyw21+(1/2)(My+M丝+Ms)V2,整理得Je=Jy+(My+M丝+Ms)V2/w21。
利用在ADAMS/View中建立的仿真模型,可以得到如下数据:Jy=0.182,Mx=136.3,M丝=4.974,My=262.818,w1=100π/3 rad/s,V=16.67mm/s,解得Je=0.284kg·m2,其中各符号代表意义如下:Je为负载的等效转动惯量;Jy为y方向丝杠转动惯量;Mx为X T作台质量;肘苎为x方向丝杠质量;My为y方向工作台质量;w1为y方向丝杠角速度;V为工作台移动速度。
建立数学模型后,在MATLAB中建立y向工作台进给系统的控制仿真模型,如图6所示。对以上模型进行仿真,仿真结果如图7所示,从仿真结果曲线中可以看出,系统是稳定的。
图6 Y向工作台的仿真模型
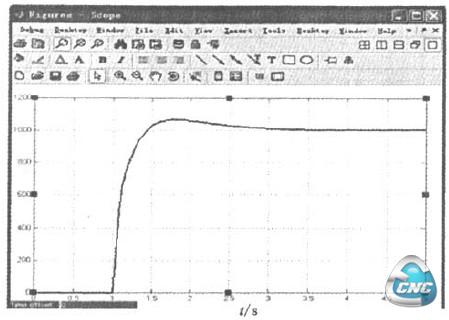
图7阶跃响应曲线
- 上一篇文章:数控技术在大飞机研制生产中的应用
- 下一篇文章:数控技术在模具工作零件制造过程中的应用