

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于五轴加工中心高精度箱体相交孔系位置度在线自动检测系统的研究与开发
大型、高精度箱体类零件加工中。孔系的形位公差测量是一个关键环节和难点问题。通过对高精度箱体上相交斜孔位置度在线自动检测系统的研究与开发.介绍了在线自动检测系统的组成、工作原理及检测数据的结果处理,并通过实例重点论述了系统设计中的重点工作即测量宏程序的编制原则和方法、工艺方案、参数选择等问题.从实现和功能的角度表述了测量系统快速性、精确性和安全性的具体措施。
3 测量宏程序实例
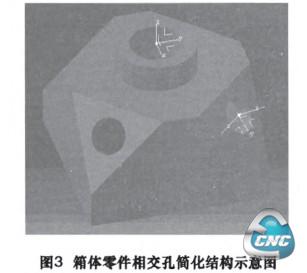
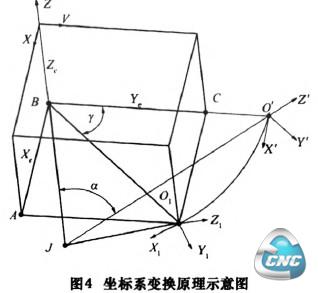
图3为某箱体零件相交孔部分简化结构示意图。设计要求零件上表面的垂直孔与斜侧面上的相交孔有较高的位置度。由于箱体较大,移动及安装定位不易,所以采用在线测量的方式进行检验。以零件上表面垂直孔作为基准孔,这样可以消除零件安装误差对测量精度的影响。对每一被测孔通过坐标系变换,设定局部坐标系,保证主轴轴线与孔轴线平行,局部坐标系的原点即为被测孔的位置理论点。坐标变换的原理如图4所示,先将原坐标系平移至被测孔中心O1(xe,Ye,Ze),X轴保持水平,坐标系绕X轴旋转α 角度,再绕Z轴旋转y角度,便得到被测孔的局部坐标系O1X1Y1Z1。测量主程序调用格式如下:G65 P100l1X Y Z A C R M F H E Q B;
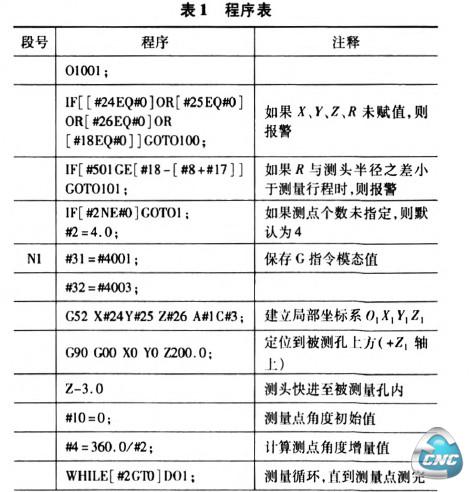
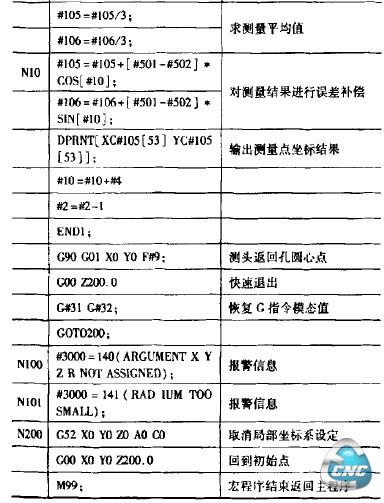
参数说明:X(#24)、Y(#25)、Z(#26)为被测孔端面中心坐标值;A(#1)、C(样3)为被测孔局部坐标系绕X、Z轴转角;R(#18)为被测孔半径;M(#13)为标准测量(0)和精密测最(1)的选项;F(#9)为测头快进速度;H(#11)为测头慢进(T进)速度;E(#8)为测头慢进和后退距离,一般应大于3.0mm;Q(#17)为测头探测超程距离,取值在2.0mm左右;B(#2)为需要的测点个数。
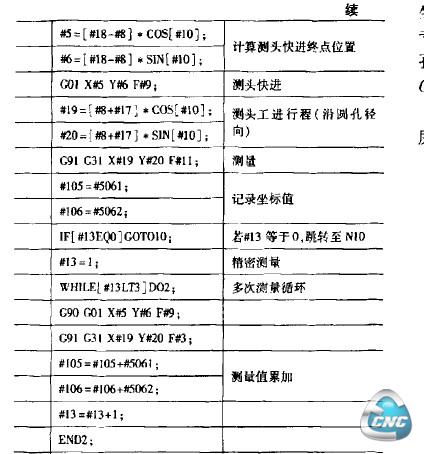
测量宏程序见表1。
- 第1页:基于五轴加工中心高精度箱体相交孔系位置度在线自动检测系统的研究与开发(1)
- 第2页:测量宏程序实例
- 第3页: 测量数据的处理
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:基于参数辨识的交流伺服速度环参数自整定
- 下一篇文章:基于PLC与变频器的蓄热式加热炉炉压控制系统改造