



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

五轴联动镗铣床改造及相关问题处理
3 电动机编码器更新及报警处理
如图4。伺服电动机位置编码器信号接人ANA模块的X10I(或X103)接口,ANA要求编码器信号为1Vpp~正弦波信号,而原用伺服电动机1FT5电动机编码器为ROD320,而此编码器为方波(TTL)信号。1FT5电动机内部结构如图5所示。电动机后端安装编码器,编码器为中空轴,和电动机轴用锥面连轴器和螺钉连接。1唧电动机用的海德汉编码器型号为ENTl837。但其轴径相差较大,1PT5用编码器轴径为Φ15mm锥孔,1m用编码器则为Φ10mm锥孔。不能直接换用。且后者价格较贵。于是,用定做的国产编码器更新,经两次调修,满足使用要求。调修中。第一次系统报警25000,编码器硬件出错。经示波器检测,信号电压幅值达1.35 V,将信号电压幅值调至0.8—1.2V以内,报警消除。第二次系统报警20002,参考点标记未建立。经查。为零位信号幅值太小;经调整零位信号幅值。满足要求。
1FT5电动机编码器的更换,相对容易一些,因为,单独的测速机。使得编码器更换中不需用示波器观测相位。相位检测由测速机保证。
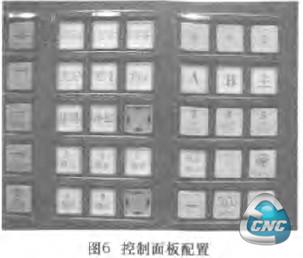
4 机床控制面板制作
MCP483C是西门子公司标准的铣床控制面板,可根据自己的需要设计制作按钮。我们根据五轴机床的特点和功能要求,制作的面板及功能配置如图6。控制面板是系统自带的I/O节点,有系统分配的地址,也要编制梯形图程序。根据功能需要。考虑到轴较多,逐个返回参考点较麻烦,我们采用自动回零设置,按回零键后,系统按X→Y→Z→A→B依次自动完成返回参考点。另外。我们还在面板上设计了自动返零完成指示灯。当然,伺服使能、主轴转速档位控制、冷却液开关、刀具夹紧、排屑等都足必不可少的。考虑到操作的方便,微型手持单元的3个功能键F1/F2/F3分别安排为启动使能、松刀/夹紧、排屑。
5 主轴高速档维修
原机床主轴转速分为两档。为28~3 300 r/rain,机床调试过程中,发现不能换档。只能在I档运行,最高转速为738r/rain。观察发现,换档时,齿轮变换液压油缸不动作。经查,PLC控制、继电器动作正常,加在电磁阀线圈的24V电压正常,怀疑电磁阀损坏。拆下检查,阀芯锈蚀、线圈烧毁。该电磁阀为日本大金工业株式会社产品。估计由于阀芯锈蚀阻力过大,导致控制电流大增线圈烧毁。用原型号替换后正常。现主轴变速系统正常,I档为30~330 r/rain,Ⅱ档为300~3300 r/min。
6 补偿功能的实现
随着科学技术的飞速发展,数控系统的误差补偿功能已成为提高机床精度的最有效的手段之一,它与单纯追求机床加工装配精度相比,有着便捷、廉价、高效等特点。目前,数控系统普遍都具有反向间隙补偿和螺距误差补偿功能。这也是目前对数控系统最基本的要求。但对于高精度的多轴系统而言,仅有这2种补偿是远远不够的。这是因为:(1)机床轴数增加,电动机的发热以及摩擦副的发热,使机床的热变形增大,于是,热误差成为不可忽视的误差源;(2)各轴误差的叠加。特别是旋转轴的加入,使得系统误差成倍增大。
西门子840D系统有着丰富的误差补偿功能,除前述2种补偿外,还有热误差补偿、垂度补偿和角度误差补偿、摩擦补偿(过象限补偿)以及跟随误差补偿等。这些补偿功能可以在相关轴参数的支持下配置在任意一台机床上,其基本思想是通过灵活的变量传递实施。
为了学习和研究补偿功能,对几种补偿进行了尝试,尽管有些补偿对本机床可能作用不大,但对研究其
原理意义重大。现以温度补偿为例,作以简要说明。在系统PLC配置时,就增加了模拟量EM331,该模块为8点模拟量输入,用作温度测量时可带4个Pt100热电阻。考虑到温度测量的实施和主要热影响。我们仅对主轴进行了温度补偿。关键是测温点的选取,实验得到温度曲线,经写人PLC变量,系统隔一段时间后读取温度,根据变量补偿主轴的热涨位移量。其他补偿实施及伺服优化已有专文叙述,这里不再重复。
7 结语
改造后的数控镗铣床,性能大幅提高。拓展了许多功能。经几年使用效果良好。通过用西门子840D系统改造五轴联动镗铣床,加深了学生对现代数控系统的进一步认识和了解,提高了学习和应用先进数控系统的能力。为数控改造积累了经验。通过数控改造。将西门子840D系统及五轴加工引人学生教学实验,大大缩短了教学条件和国外先进技术的距离,受到了事半功倍的效果。用改造的五轴机床对本科生开设的五轴联动加工开放实验,既使学生学习了840D系统的使用和操作,也学习了叶片等复杂曲面的变成机加工技术。多个研究团队利用五轴联动机床及840D系统进行丁数控机床重大专项研究,将我校的数控技术教学实践和科研水平提高到一个新的起点。
- 第1页:五轴联动镗铣床改造及相关问题处理(1)
- 第2页:系统配置及连接
- 第3页:电动机编码器更新及报警处理
- 上一篇文章:基于参数辨识的交流伺服速度环参数自整定
- 下一篇文章:基于PLC与变频器的蓄热式加热炉炉压控制系统改造