

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种基于RTLinux的五自由度开放式并联激光加工数控系统
本文研究了一种基于RTLinux的五自由度开放式并联激光加工数控系统,系统中嵌入了三分支五自由度构型的位置正反解模型,解决了特定位置多解的问题。插补过程应用了S曲线加减速控制和小线段插补结合的算法。同时,在数控系统中增加了工艺控制模块,实现了激光功率、离焦量等激光加工工艺参数的调整功能。
3.1 建立正反解几何模型
机器人机构简图如图3所示,在本文所述的机构中,将光轴位姿参数(虚轴坐标)换算到驱动坐标位置(实轴坐标)称为反解运算。
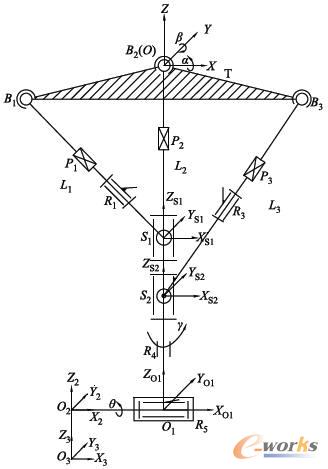
图3 机器人机构简图
设定L2分支中绕X轴旋转虎克铰的旋转角度为α,绕Y轴旋转虎克铰的旋转角度为β,3个分支的杆长分别为L1、L2、L3,串联关节回转转动副和俯仰转动副的转角分别为γ和θ,则由位姿坐标变换可得到:

已知机器人末端执行器相对于固定参考坐标系O-XYZ的位姿矩阵:
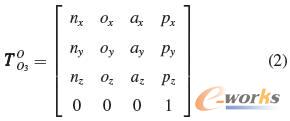
求解此矩阵方程可得α、β 、γ、θ、L2。
根据求解得到的α、β和L2,将TOS2和TOO1求解出来。得到S2和O1在固定参考坐标系O-XYZ中的坐标,则得到下式:

在固定平台OB1B3中,OB1B3为已知三角形,则很容易得到其他两杆长度为:

正解过程与反解过程正好相反:已知机器人的关节变量L1、L2、L3和γ、θ,求解机器人末端位姿矩阵。
根据关节变量L1、L2和L3,以及B1、O、B3点坐标,列距离方程可以求解到L2分支绕X轴和绕Y轴的旋转角度α 和β。其求解方程如下:
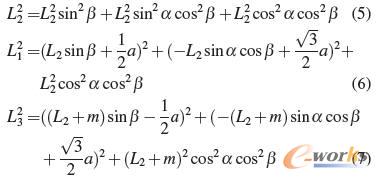
根据得到的α和β,将已知的L2、γ、θ代入到位姿变化矩阵,即可将机器人的末端位姿矩阵求解出来,完成运动学正解。
- 上一篇文章:数控装置的日常维护与保养
- 下一篇文章:机床数控系统的组网与远程监控的实现