



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

“机器换人” 还是 “人机协作” ? ——协作机器人的现状与展望
◆ 瑞士ABB 公司的YuMi

图4 ABB YuMi 机器人
ABB 的YuMi 是一个的双臂组装解决方案,并具有视觉和触觉。YuMi 的双臂以软性材料包裹,并具有仿人手臂的灵巧度,使其可以在开放环境中工作。YuMi 体系较小,涉及宽度为600mm,适合于生产线紧凑的空间,并且有基于摄像头的工件定位系统。
◆ 瑞士Mabi 的Speedy 机器人

图5 Mabi 的Speedy 机器人
Speedy 协作机器人是一款轻型的6 轴工业机器人,其负载约为10kg,工作范围达1384mm,其操作臂末端配有气动卡爪。鉴于其低成本的特性,有望进一步降低协作机器人的门槛。
◆ 美国Rethink 公司的Baxter

图6 Baxter 协作型机器人
Baxter 具有两条手臂和一张平板显示的脸,脸上的卡通眼睛可以随着电力变化和任务执行程度而变化。Baxter 拥有一套复杂的安全机制和多种传感器,可以保护它所协助的人的安全。
Baxter 的头顶有一圈声纳传感器, 只要有人过于接近工作区域,传感器就会放慢动作。Baxter 现在已经广泛应用于工厂,科研和教学场合。Baxter 底部配有滚轮和基架,可以安装在流水线任意地点。
◆ 德国KUKA 的LBR iiwa 机器人
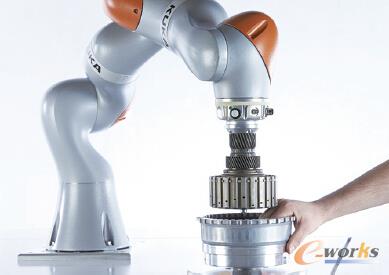
图7 KUKA 的LBR iiwa 机器人协作型机器人
LBR iiwa 是一款单臂7 自由度机器人操作臂,它是为实现直接的人机协作而设计,集灵敏性、柔性、和轻型驱动技术于一体,适用于工业领域。最大缺点在于价格较为昂贵,是优傲机器人的3 倍之多。
另一方面,协作型机器人的有序发展离不开行业规范和安全标准的约束。2013 年5 月,美国机器人工业协会(RIA)宣布最新的机器人安全标准已经通过美国国家标准学会(ANSI)的认可。新ANSI/RIA R15.06-2012 版本标准是1999 版本标准的升级版,等同于国际ISO10218:2011 机器人安全标准。其中一项对国际等同标准的重要升级覆盖了人员和机器人的协同工作情况。此标准为协同机器人作业提出了四项要求,确保人员可以靠近一台正在运行的无安全护网的机器人。处于协同工作模式下的机器人必须满足标准提出的四项要求之一:
◆具有安全等级的受控制动;
◆手控;
◆速度和间距监控;
◆限制功率和力。
国际委员会起草了ISO 技术规范(TS)15066,作为在协同工作模式下使用此标准的指导。具体内容仍在进行技术开发,开发完成之后需要征得业界的认可才能作为ISO10218 安全标准的补充。目前,标准中仅仅提到需要对功率和力进行限制,但是并未明确指出应该将功率和力限制在什么水平。
协作机器人新技术探索
毫无疑问,从安全防护网走出来的协作机器人在克服了自身安全隐患,证明自己可以与工人并肩作战后,等待它们的是更加多样化的工作任务和工作环境。当今制造业以分布式作业模式为特征,其生产任务和环境的多样化是无法避免且又亟待解决的。倘若协作机器人能够填补此项技术空白,这将会成为工业领域一项划时代意义的突破。它会降低生产成本,提高生产效率,甚至重新定义自动化制造这一概念。
机器人软件技术的不断深化与进步给协作型机器人的发展提供了肥沃的土壤,大大增强了协作型机器人的“软实力”。更为便捷的软件技术使得安装维护成本骤减,同时机器人参数更改和调试周期从过去的数年数月缩减到数天。较为主要的软件技术包括有:
1. 柔顺运动控制技术。对于焊接、搬运和喷涂类工作, 机器人位置控制足以满足任务需求。然而对于切削、打磨抛光,尤其是装配等作业中,柔顺运动控制是必不可少的。这是因为焊接喷涂等对于位置精度的要求非常高,需要在运动方向上表现出很硬的特性,也就是很大的刚性;而打磨装配中需要在运动方向上实现力控制,因此需要有较软的特性, 也就是较小的刚性。
以装配作业为例,如果机器人运动模式与人类近似,则机器人能感知与工件的相互作用,顺利地引导工件的运动方向甚至能自动将工件安装在夹具上。
2. 高级人工智能。人工智能(Artificial Intelligence)是对人的意识、思维的信息过程的模拟,将此模拟结果赋予机器人,则机器人就可以像人类一样具有自我意识。高级人工智能是一门研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的技术科学,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。
若协作型机器人被成功赋予高级人工智能,机器人将获得与真人一般的“常识”,从而能人机协同作业更易被整合。另一方面减少了用户参与决断的机率,使得机器人变得更“聪明”。
3. 传感器集成化和机器视觉。机器人传感器是用来检测机器人自身的工作状态,以及机器人智能探测外部工作环境和对象状态的核心部件。机器人传感器能感受规定的被测量,并按照一定的规律转换成可用输出信号,反馈到中央处理系统或末端执行器上。而为了实现在复杂、动态以及不确定性环境下的行动自主性,需要快速集成视觉、听觉、压觉、热觉和力觉等不同功能的传感器,通过合理组合,形成机器人的感知系统。传感器集成化将促使机器人对未建模或半建模状态的外界环境变化做出实时、准确、灵活的行为响应, 协作机器人也将能够更快地适应不同要求的作业场合。
4. 可扩展软件架构。软件架构的可扩展性决定了机器人能在多大程度上整合更多功能模块而不超出系统可承受范围。目前研究热点之一的可重构机器人(Reconfigurable Robot)就是基于可扩展的软硬件平台发展而来的。未来机器人市场将会向以功能模块为单位,并且针对各个不同的作业要求个性化定制的方向发展。
总结和展望
随着工业4.0 时代的来临,全世界的制造企业也即将面对各种新的挑战。有些挑战已经通过日益成熟的自动化及自动化解决方案中机器人的使用得到了应对。在过去的生产线和组装线等工作流程中,人和机器人是隔离的,这一格局将有所改变。协作型机器人将会变得越来越重要。虽然有些领域和生产线还是需要人力操作,但有些仍可以使用机器人实现局部自动化,以优化生产线。引进协作型机器人会为生产线和组装线应对挑战开拓新的机遇,找到更好的解决方案, 把人和机器人各自的优势发挥到极致。
“智能工厂”、“无人工厂”在工业4.0 时代成为大热之词,并被认为是自动化的最高境界。那么,这是否意味着未来人将被机器所取代呢?其实不然,我们应该这样理解: 未来的工厂将是人与机器和谐共处的所缔造的。协作型机器人作为一种新型的机器人,它将小件装配等自动化应用带入了一个全新时代,工人与机器人可以和谐共处,共同完成一个任务。
在我国逐渐步入老龄化、少子化的现实面前,发展协作型机器人是促进社会生产力质的提升的行之有效的手段。当前我们产学研三方共同努力的目标,就是实现人类劳动力和机器人劳动力的历史性“握手”,让人类与机器人真正意义上共同工作,提高生产力从而满足居民日益增长的物质需求。
当今协作型机器人发展的浪潮中,协作机器人的深度研发和普及需要广大科研单位和制造企业共同推动。希望在不久的将来,协作机器人能在国务院提出的“中国制造2025”的大格局下茁壮成长。
- 上一篇文章:“智能制造”浪潮之下 看机床企业“各显神通”
- 下一篇文章:薄底有岛类腔体零件数控加工