



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

工业机器人全方位解读
4.机器人关键基础部件
机器人共4大组成部分,本体成本占22%,伺服系统占24%,减速器占36%,控制器占12%。机器人关键基础部件是指构成机器人传动系统,控制系统和人机交互系统,对机器人性能起到关键影响作用,并具有通用性和模块化的部件单元。机器人关键基础部件主要分成以下三部分:高精度机器人减速机,高性能交直流伺服电机和驱动器,高性能机器人控制器等。
1)减速机
减速机是机器人的关键部件,目前主要使用两种类型的减速机:谐波齿轮减速机和RV减速机。
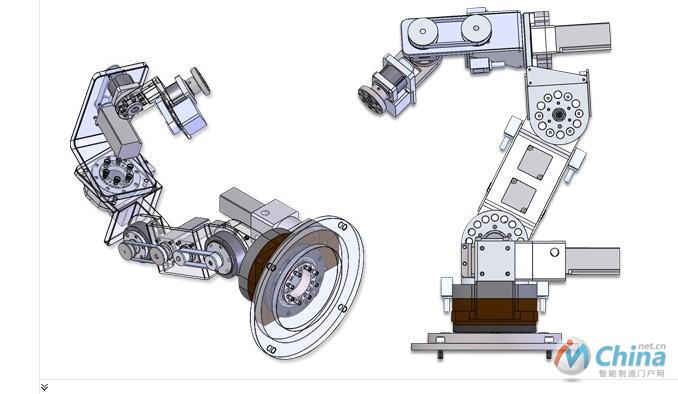
减速机应用在机器人关节处
谐波传动方法由美国发明家C.WaltMusser于20世纪50年代中期发明。谐波齿轮减速机主要由波发生器、柔性齿轮和刚性齿轮3个基本构件组成,依靠波发生器使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力,单级传动速比可达70~1000,借助柔轮变形可做到反转无侧隙啮合。与一般减速机比较,输出力矩相同时,谐波齿轮减速机的体积可减小2/3,重量可减轻1/2。柔轮承受较大的交变载荷,因而其材料的抗疲劳强度、加工和热处理要求较高,制造工艺复杂,柔轮性能是高品质谐波齿轮减速机的关键。
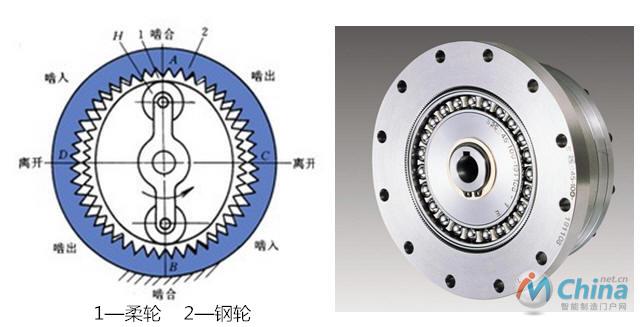
谐波齿轮减速机传动原理
德国人LorenzBaraen于1926年提出摆线针轮行星齿轮传动原理,日本帝人株式会社(TEIJINSEIKICo.,Ltd)于20世纪80年代率先开发了RV减速机。RV减速机由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成。相比于谐波齿轮减速机,RV减速机具有更好的回转精度和精度保持性。

减速机
陈仕贤发明了活齿传动技术。第四代活齿传动——全滚动活齿传动(oscillatory roller transmission,ORT)已成功地应用到多种工业产品中。在ORT基础上提出的复式滚动活齿传动(compound oscillatory roller transmission,CORT)不但具有RV传动类似的优点,而且克服了RV传动曲轴轴承受力大、寿命低的缺点,进一步提高了使用寿命和承载能力;CORT的结构使其在同样的精度指标下回差更小,运动精度和刚度更高,缓解了RV传动要求制造精度高的缺陷,可相对降低加工要求,减少制造成本。CORT是我国自主开发的,拥有自主知识产权。鞍山耐磨合金研究所和浙江恒丰泰减速机制造有限公司均开发成功了机器人用CORT减速机。
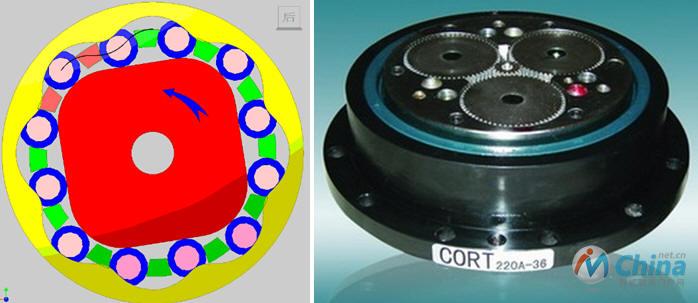
ORT减速机 CORT减速机
目前在高精度机器人减速机方面,市场份额的75%均两家日本减速机公司垄断,分别为提供RV摆线针轮减速机的日本Nabtesco和提供高性能谐波减速机的日本Harmonic Drive。包括 ABB, FANUC, KUKA,MOTOMAN在内国际主流机器人厂商的减速机均由以上两家公司提供,与国内机器人公司选择的通用机型有所不同的是,国际主流机器人厂商均与上述两家公司签订了战略合作关系,提供的产品大部分为在通用机型基础上根据各厂商的特殊要求进行改进后的专用型号。国内在高精度摆线针轮减速机方面研究起步较晚,仅在部分院校,研究所有过相关研究。目前尚无成熟产品应用于工业机器人。近年来国内部分厂商和院校开始致力高精度摆线针轮减速机的国产化和产业化研究,如浙江恒丰泰,重庆大学机械传动国家重点实验室,天津减速机厂,秦川机床厂,大连铁道学院等。在谐波减速机方面,国内已有可替代产品,如北京中技克美,北京谐波传动所,但是相应产品在输入转速,扭转高度,传动精度和效率方面与日本产品还存在不小的差距,在工业机器人上的成熟应用还刚刚起步。
国内外工业机器人主流高精度谐波减速机性能比较如下表所示。
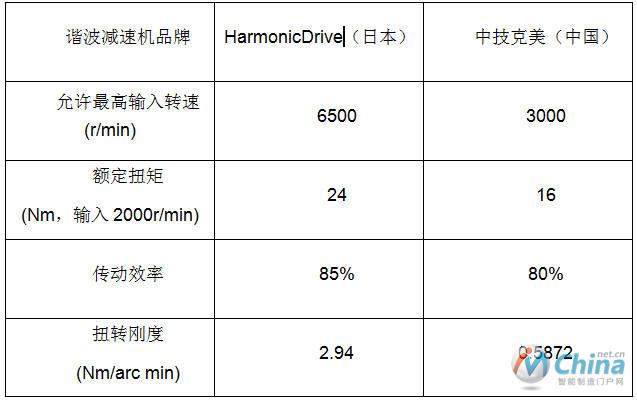
表1 主流高精度谐波减速机性能比较
注:上表比较数据来自相近型号:
HD :CSF-17-100
中技克美:XB1-40-100
传动效率测试工况:输入转速1000r/min,温度40°
扭转刚度测试条件:20%额定扭矩内
国内外工业机器人主流高精度摆线针轮减速机性能比较如下表所示。
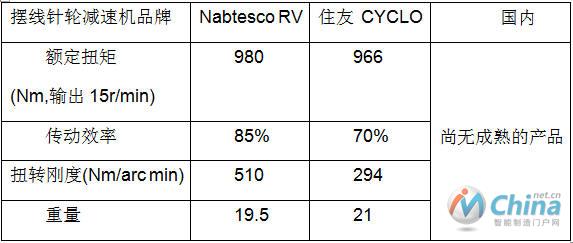
表2 主流高精度RV摆线针轮减速机性能比较
注:上表比较数据来自相近型号:
RV:100C
CYCLO:F2CF-C35
传动效率测试工况:输出转速15r/min,额定扭矩
2)伺服电机
在伺服电机和驱动方面,目前欧系机器人的驱动部分主要由伦茨,Lust,博世力士乐等公司提供,这些欧系电机及驱动部件过载能力,动态响应好,驱动器开放性强,且具有总线接口,但是价格昂贵。而日系品牌工业机器人关键部件主要由安川,松下,三菱等公司提供,其价格相对降低,但是动态响应能力较差,开放性较差,且大部分只具备模拟量和脉冲控制方式。国内近年来也开展了大功率交流永磁同步电机及驱动部分基础研究和产业化,如哈尔滨工业大学,北京和利时,广州数控等单位,并且具备了一点的生产能力,但是其动态性能,开放性和可靠性还需要更多的实际机器人项目应用进行验证。

伺服电机
3)控制器
在机器人控制器方面,目前国外主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发。目前通用的多轴控制器平台主要分为以嵌入式处理器(DSP,POWER PC)为核心的运动控制卡和以工控机加实时系统为核心的PLC系统,其代表分别是Delta Tau的PMAC卡和Beckhoff的TwinCAT系统。国内的在运动控制卡方面,固高公司已经开发出相应成熟产品,但是在机器人上的应用还相对较少。
5.机器人操作系统
通用的机器人操作系统(robot operating system,ROS)是为机器人而设计的标准化的构造平台,它使得每一位机器人设计师都可以使用同样的操作系统来进行机器人软件开发。ROS将推进机器人行业向硬件、软件独立的方向发展。硬件、软件独立的开发模式,曾极大促进了PC、笔记本电脑和智能手机技术的发展和快速进步。
ROS的开发难度比计算机操作系统更大,计算机只需要处理一些定义非常明确的数学运算任务,而机器人需要面对更为复杂的实际运动操作。
ROS提供标准操作系统服务,包括硬件抽象、底层设备控制、常用功能实现、进程间消息以及数据包管理。
ROS分成两层,低层是操作系统层,高层则是用户群贡献的机器人实现不同功能的各种软件包。
现有的机器人操作系统架构主要有基于linux的Ubuntu开源操作系统。另外,斯坦福大学、麻省理工学院、德国慕尼黑大学等机构已经开发出了各类ROS系统。微软机器人开发团队2007年也曾推出过一款“Windows机器人版”。
6.机器人的运动规划
为了提高工作效率,且使机器人能用尽可能短的时间完成特定的任务,必须有合理的运动规划。离线运动规划分为路径规划和轨迹规划。
路径规划的目标是使路径与障碍物的距离尽量远同时路径的长度尽量短;轨迹规划的目的主要是机器人关节空间移动中使得机器人的运行时间尽可能短,或者能量尽可能小。轨迹规划在路径规划的基础上加入时间序列信息,对机器人执行任务时的速度与加速度进行规划,以满足光滑性和速度可控性等要求。
示教再现是实现路径规划的方法之一,通过操作空间进行示教并记录示教结果,在工作过程中加以复现,现场示教直接与机器人需要完成的动作对应,路径直观且明确。缺点是需要经验丰富的操作工人,并消耗大量的时间,路径不一定最优化。为解决上述问题,可以建立机器人虚拟模型,通过虚拟的可视化操作完成对作业任务的路径规划。
路径规划可在关节空间中进行。Gasparetto以五次B样条为关节轨迹的插值函数,并将加加速度的平方相对于运动时间的积分作为目标函数进行优化,以确保各个关节运动足够光滑。刘松国通过采用五次B样条对机器人的关节轨迹进行插补计算,机器人各个关节的速度、加速度端点值,可根据平滑性要求进行任意配置。另外,在关节空间的轨迹规划可避免操作空间的奇异性问题。Huo等人设计了一种关节空间中避免奇异性的关节轨迹优化算法,利用6自由度弧焊机器人在任务过程中某个关节功能上的冗余,将机器人奇异性和关节限制作为约束条件,采用TWA方法进行优化计算。
关节空间路径规划与操作空间路径规划对比,具有以下优点:
①避免了机器人在操作空间中的奇异性问题;
②由于机器人的运动是通过控制关节电机的运动,因此在关节空间中,避免了大量的正运动学和逆运动学计算;
③关节空间中各个关节轨迹便于控制的优化。
- 第1页:工业机器人全方位解读(1)
- 第2页:工业机器人全方位解读(2)
- 第3页:工业机器人全方位解读(3)
- 第4页:工业机器人全方位解读(4)
- 第5页:工业机器人全方位解读(5)
- 第6页:工业机器人全方位解读(6)
- 第7页:工业机器人全方位解读(7)