



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

FANUC 系统特殊功能指令在数控编程中的应用
二、应用实例分析
1. 零件特点
图1是橡胶传送带的成型模板。齿形为曲线凹槽,横截面为梯形,齿形成直线等距排列。初始工件坐标系设定为G54 原点位置,如图1 所示。
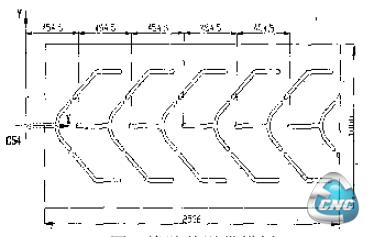
图1 橡胶传送带模板
首先在初始工件坐标系G54下,编写模板零件的第一个齿形加工宏程序O7001。在零件的加工过程中,由主程序O7000 调用O7001 宏程序。第一个齿形加工完成后,利用可编程参数设定指令G10的工件坐标系变更功能,在加工其他齿形时通过变更初始工件坐标系G54的设定值,使工件坐标系按齿形排列间距产生平移,为下一齿形的加工重新自动设定工件坐标系。程序执行框图如图2 所示。
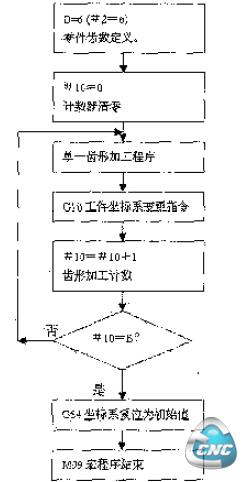
图2 宏程序O7001执行框图
宏程序O7001 中利用系统宏指令的参数计算以及判断循环功能,通过多次循环执行,将各齿形依次加工完成。下面是具体加工程序。
O7000
(T-XING CHUAN SONG DAI)
(KMC-4000SV)
G00 G90 G80 G49 G53 Z0
N10 T25 M06 (ENDMILL D=25MM)
G00 G90 G54 X812.554 Y-330.85
S220 M03
G43 Z20. H25
G65 P7001 B=6
GOO G49 G53 Z0 M05
T0 M06
M 3 0
O7001
( M A C R O )
#10=0
N20 G00 G90 G54 X812.554 Y-330.85
Z5.
G01 Z-20.2 F40
X618.961
G02 X600.095 Y-323.983 I0 J29.35
G01 X494.334 Y-235.239
G00 Z75.
X454.5 Y-201.815
Z5.
G01 Z-20.2
X312.265 Y-82.465
G02 X312.265 Y82.465 I69.196
J82.465
G01 X454.5 Y201.815
G00 Z75.
X494.334 Y235.239
Z5.
G01 Z-20.2
X600.095 Y323.983
G02 X618.961 Y330.85 I18.866 J-
22.483
G01 X812.554
G00 Z75.
X273.811 Y0
Z5.
G01 Z-20.2
X 0
G00 Z75.
X275.449 Y18.713
Z5.
G01 Z-20.2
G02 X253.144 Y0 I-22.305 J3.937
G02 X275.449 Y-18.713 I0 J-22.65
G00 Z100.
G91 G10 L2 P1 X454.5 Y0 Z0
#10=#10+1
IF [#10 EQ #2] GOTO 100
GOTO 20
N100 G90 G10 L2 P1 X-1583.75 Y-
560.03 Z-683.7 ( 初始工件坐标系设定值)
M 9 9
三、结束语
采用可编程的参数设定指令G10,通过编程的方式更改刀具补偿量、根据需要重新设定工件坐标系,使工件坐标系可在任意方向上移动。将该指令与宏指令配合使用,增强了零件加工程序的逻辑性和灵活性,进一步扩展了数控系统的功能。零件加工程序大幅度简化,提高了编程效率,降低了编程差错率。在数控程序中采用特殊功能指令及参变量,为解决一些特殊及复杂零件的加工程序编制问题打开了思路。
- 上一篇文章:CAM程序导入数控系统
- 下一篇文章:用先进数控刀具提高数控机床的效率