

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
文章推荐
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于Windows XP+RTX的PC数控软件关键技术研究
为了充分利用PC机的软硬件功能,开发了一种基于Windows XP+RTX的原型PC数控软件,研究了软件体系结构、线程任务调度及各模块信息流程;在RTSS子进程中,采用数据采样法、加减速处理方法、数字积分法实现了插补和位控强实时性任务;通过并口发送控制信号。经并口接口板实现电平转换后供驱动板控制电动机。
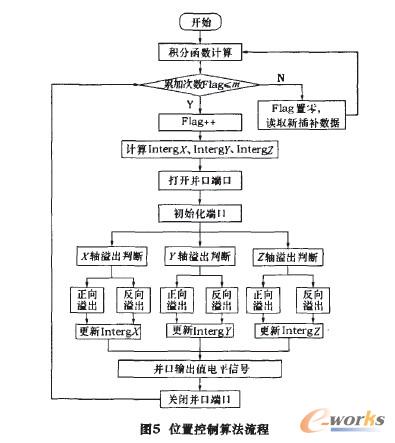
位置控制模块,主要针对以脉冲控制的步进电动机或伺服电动机,在Pc主机系统与步进驱动板之间利用并行接口来作为信号接口转换,脉冲源由PC主机系统RTX实时扩展高精度时钟产生。位置控制中精插补采用数字积分法,整个位置控制算法流程如图5所示。在针对并口发送控制信号前,用到RTX端口服务,需要将并口设置成RTX环境下识别的设备。
4 实验案例
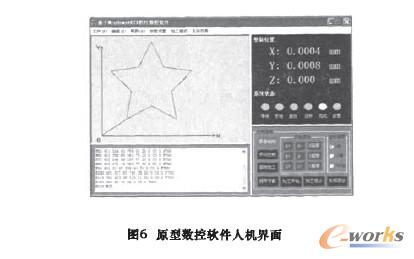
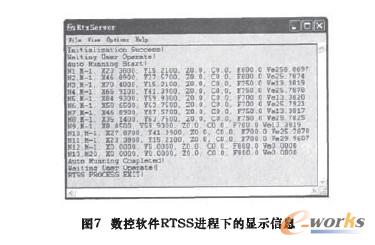
在实验前进行的是调试阶段。这一阶段,电动机空运转,观察电动机的运行状况,通过实时仿真技术检验插补数据的轨迹仿真情况,同时观察坐标及系统状态显示情况是否存在异常,若出现问题时,到相应的模块中查明原因,这样可以减小在实际实验中出现损坏设备的概率。图6为实验完成时数控软件运行界面。图7为实验时运行RtxServer实时显示信息结果,其中p是根据加减速控制算法计算出的每段转接处的速度值。图8为实验结果,仿真结果与源代码相符合。

5 结语
本文开发了一种基于Windows XP+RTX的原型Pc数控软件,研究了软件结构、线程任务调度及其实现方法,设计了控制算法流程图,整个软件采用1广模块化的设计,模块间通过数据接门通信,可以很方便地增加功能模块和改进控制算法。通过实验,检验了整个数控软件的结构体系和核心控制算法,同时也为进一步研究基于RTX进行数控系统开发应用提供了理论基础。
参考文献
[1]Williams,Tom.Tools add fault toleran-ce,scalability to real-time Windows
NT[J].Electronic Design,1997,45(21):100.
[2]Venturcom lnc.RTX5.1 SDK Docume~ntion,2001.
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:数控机床PLC故障实例解决方法
- 下一篇文章:基于Pro/e数控加工后处理技术研究