



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

PLC在FIDIA系统刀库中的应用研究
要清楚手动换刀的具体过程,以便对程序进行完善和发展,对程序的仔细分析必不可少:
程序1: P15 刀臂和倒刀缸运动块
P15INI: ACL MANATC ;初始加载标签(MANATC变量位在PLC**.DEF中定义。为CNC和AUCOL公用内部变量)
IFEQ PEND ; MANATC位等于1时,执行以下的手动操作
ACL DISA7 ; 将DISA7调入累加器即旋开手动允许开关
IFEQ PEND ;若手动开关等于0 则结束
ACL DIPCS8 ;若手动开关为1,将按键输入信号ATC OUT(DIPCS8见图4)调入累加器
IFNE LOAD P15,P15.A05 ;若按键DIPCS8=1(ATC OUT)时候,加载P15.A05段
ACL DIPCS7 ;若按键DIPCS8 等0 时候,按键输入信号
ATC IN(DIPCS7见图4)加载
IFNE LOAD P15,P15.A06
PEND
P15.A05:ACL DIPCS8 ;ATC OUT
IFNE PEND ;若DIPCS8按键等于1(ATC OUT),结束
ACL DIQ102 ;否则将定位缸缩回开关量DIQ102 调入累加器
IFEQ JUMP P15.A10 ;若DIQ102等于0,执行跳转指令
ACL DIQ104 ;若DIQ102等于1,DIQ104(倒刀缸上位)与
DIQ105非(倒刀缸下位)相与加载进累加器
AND DIQ105 NG
IFEQ JUMP P15.A15 ;若相与结果为0,执行跳转指令
BCLR DUYV10 ;若结果为1,输出信号倒刀缸上位ATC缩回置0
BSET DUYV09 ; 输出信号倒刀缸下位ATC伸出=1
JUMP P15END ;执行完后跳到P15END块中
PEND
P15.A06:ACL DIPCS7 ;ATC IN 段
IFNE PEND ;若DIPCS7按键输入信号为1,则结束
ACL DIQ102
IFEQ JUMP P15.A10 ;若定位缸DIQ102 位为0,则跳到
P15.A10块
ACL DIQ105
AND DIQ104 NG
IFEQ JUMP P15.A15 ;若DIQ105 和DIQ104 非相与结果为0则跳到P15.A15块
BCLR DUYV09
BSET DUYV10
JUMP P15END
PEND
P15.A10:DMSG 25 ; 显示第25 号PLC 类报警信息即“SQ103 OFF”
JUMP P15END
PEND
P15.A15:DMSG 26 ;显示26 号信息即“SQ104 OR SQ105
ERROR”
JUMP P15END
PEND
P15END: LOAD P15,P15INI ;返回P15加载初始点
PEND 程序2: P16 换刀动作块
P16INI: ACL MANATC
DISA7 ;MANATC等于1时候将(刀库手动允许开关)调入累加器
IFEQ PEND
ACL DIPCS6 ;旋转按钮按键位(DIPCS6见图4)加载进累加器
IFNE JUMP P16.A05 ;转到P16.A05程序块中
ACL DUATC ;若按键为0时候,将电机控制位DUATC装进累加器,若此控制位仍为1,马上置0,若其为1则结束。
IFNE BCLR DUATC
PEND
P16.A05:ACL DUATC
IFNE PEND ;若电机控制信号为1 那么此块结束,
PAUSE 5 ;否则等待5秒后将控制电机的输出信号置1
BSET DUATC
PEND
注:DI代表外围数字输入,DU代表外围数字输出,这里,DIP代表面板上按键数字输入,DUL为面板上按键数字输出。
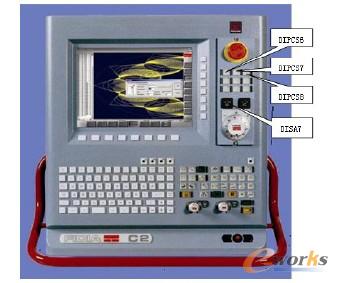
图4 人机界面上对应按的相关键输入点
先将每一步的逻辑关系依次反映在结构图上,再分析整块进程要实现的内容。分析中形成如上图的流程结构,有助于对冗长的进程块进行快速的理解。
根据以上分析,换刀过程的步骤就明确了。结合机床在实际换刀中所处的位置,会发现,在现场操作中,容易出现这样的问题:
(1)当DUYV9(倒刀缸下位刀臂伸出信号)为1时候,应该禁止X,Y,Z轴移动,因为当机床在伸出刀臂后和Y向机床运动方向的间隙就很小了,若此时Y向移动,会和整个刀臂发生接触,甚至将安装刀臂的刀库位置抵变形,如何解决这个问题,这里,有三种可行方法:
①当DUYV9 为1 时,将AUCOL 输出位DUSAZ,DUSAY,DUSAX(Z、Y、X控制位)置1以禁止其移动;
②当DUYV9为1时,调用CNC位MDPBL使其置1使坐标及主轴保持;
③定义一个信息变量MSG31,在DUYV9位以及坐标移动监控位同时为1的时候将MSG31置1,并将MSG31写入到P37(见表1)中将其做为产生急停报警的条件,便可以解决手动操作中的这种安全隐患。
(2)另外,在进行手动操作前,主轴位置应该具备什么条件,程序里面并没有给出,只是要求内部变量MANATC赋值为1就行,这里也出现了问题。因为主轴侧有两个定位键,如果主轴未能定位,刀臂在旋转到主轴侧装刀的时候会和键发生碰撞,这是我们非常不想看到的现象,因此在这个操作的时候一定要先执行主轴定位指令,如果不熟悉这段程序和实际动作,后果不堪设想。
总之,PLC控制是站在用户立场,以用户需要为出发点,以直接应用于各种工业环境为目标的一种逻辑控制,是一种理论与实际结合的产品。由于PLC出厂程序是依照理论上输入输出间的逻辑关系编写而成,而实际上的机床所处的安装条件,现场环境,以及操作者的操作方法等有所不同,或者是PLC本身不够完善,都有可能造成机床故障或是机床安全隐患,对机床PLC有比较深入的研究是解决这些问题的重要条件。
4 结束语
目前,对可编程控制器我国正处于引进、消化、研制的阶段,普及可编程控制器技术,大力推广其应用是当务之急。PLC的发展,在数控技术中的发展中发挥着越来越重要的作用。通过对PLC程序的理解,运用逻辑思维能力逐步诊断是我们很多时候设备故障排除的基础。在当前工作中,PLC的分析研究是一个薄弱环节。不断完善对机床的PLC的熟练程度,能有效提高设备维修人员发现并解决故障、了解并优化参数等的能力,促使设备维修工作向前发展。
- 上一篇文章:西门子810D数控车床与PC的数据传输方法
- 下一篇文章:数控车床夹具的改进