



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

五自由度自由曲面加工系统及其CAM设计
图5所示为在Pro/E中建立的球面模型,球心点为O,P是球面上的一个加工点。

图5 球面CAD模型
为了简化计算,球心坐标系O的各个轴的方向可以参照坐标系结构图(图4)上的O5坐标系建立。假设O5与O重合,加工P点时,在P点建立坐标系的准则是:X轴方向为电极丝所处方向,Y轴方向为电极丝的移动方向,若不考虑电极丝半径和放电间隙,那么XY轴所确定的平面就是球面在P点的切平面,所以Z轴指向球心O。
机床在加工P点时,电极丝上的坐标系Oω应该与加工点坐标系P重合。设球的半径为R,P点在球面的CAD模型中的坐,y,z),容易计算出
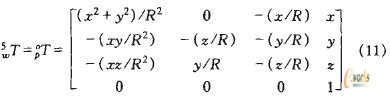
将上式代入(式10)就可以计算出机床各个轴在加工球面时的位移量。
上面以球面为例介绍了g5的求解方法,至于其它类型曲面,建立坐标系后可采用相同的方法进行求解。利用此数学模型可将在Pro/E中提取的三维表面形状数据点转换为加工过程中五轴位移量,解决了建立五轴联动机床CAM系统的关键问题。
4 结论
使用线切割加工技术进行曲面加工具有重要的意义和广泛的应用前景,但是传统WEDM机床在这方面具有各种各样的局限性,限制了其加工范围和加工的精度。本研究以新型五轴联动机床为平台,进行机床曲面加工CAM系统的设计,创造性地将机器人理论引入了电火花线切割领域,利用机器人运动学理论,建立机床数学模型,提出了一种新型算法,解决了从坐标点到各轴位移量的转换计算问题,并在此基础上构建了机床的CAM系统,从而大大扩展了线切割机床的加工范围。新型结构的引人,可以大大提高机床的加工精度,使线切割机床可以应用于精密的曲面加工。
参考文献:
[1]狄士春,于滨,等.国内外电火花线切割加工技术最新进展[J].电加工与摸具,2003(3):12-16.
[2]边玉超.自由曲线曲面CNC插补技术的研究[D].北京化工大学,2004.5.
[3]王新荣,任福君,赵英海,空间曲面线切割五轴联动加工系统的研制[J].应用科技,2003,(3):4-5.
[4]王新容,任福君,张霞复杂曲面电火花线切割多轴联动加工运动学的建立[J].佳木斯大学学报,2001,(4):19-21.
[5]陈飞.数控车床坐标系传递关系的分析[J].林业机械与木工设备.2002,(12):24~25.
- 上一篇文章:数控加工艺性分析
- 下一篇文章:数控加工中心编程的特点