



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

五自由度自由曲面加工系统及其CAM设计
3 五轴联动机床坐标系统数学模型推导
3.1 五轴联动机床数学模型的推导
从运动几何学的角度来看,可以将机床看作是关节型机器人,对机床坐标系求解,归根结底属于机器人运动学求反解的问题。也就是在电极丝和加工工件的相对位置关系已知时,求解机床各个轴关节的位移量(包括平动位移和角位移)。根据关节型机器人运动学理沦,在机床每一个关节上建立运动坐标系,随同关节运动,这些运动坐标系是相对坐标系。关节的轴线通常也作为运动坐标系的一个轴,坐标原点一般选在关节轴线上的一个便于识别的特征点上,以方便计算[4|。
对图2所示机床建立坐标系统如图4所示。O0是机床的零点坐标系,是固定坐标系。为了以后计算方便,图中在电极丝上建立了电极丝坐标系Oω并且使其坐标轴方向跟05坐标轴初始方向一致,Oω坐标系相对机床来说也是固定不变的,假设Oω坐标系原点在机床零点坐标系O0中的坐标是{△x,△y,△z}。
从图4可以看出,系统一共有7个变量,由于d4和d5是机床常数,所以需要求解的共有五个位移变量:dl、d2、d3、θ4和θ5,分别是X轴位移、Y轴位移、Z轴位移、B轴摆动角度和C轴转动角度。d1、d2和d3是移动变量,θ4和θ5是转动变量[5]。
根据图4首先按照齐次坐标变换方法建立机床各个轴的连杆参数变换矩阵,![]() 符号表示Oω坐标系在O0坐标系中的描述,其余类推。
符号表示Oω坐标系在O0坐标系中的描述,其余类推。
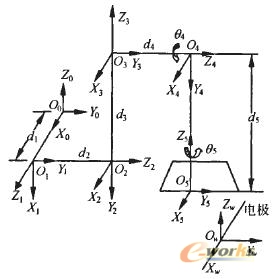
图4 机床坐标系统图
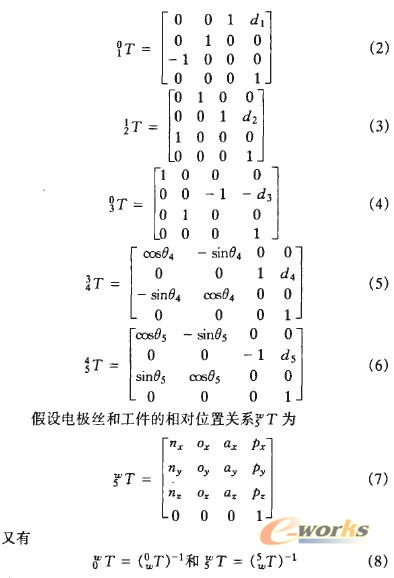
将式1~8代入下列闭环关系式

其中,θ4是摆动角度,根据机床实际结构,其取值范围是在(-90°~90°)。当az=0时,θ4处于极限位置一90°(nz<0)或90°(nz>0)。
θ5是转动角度,存在关系θy=cosθ5和θx=sinθ5。所以,当θy>0时,θ5处于第一、四象限;当θy<0时,θ5处于第二、三象限;当θy=0时,θ5等于90°的整数倍。
在上式的推导中,是假设电极丝和加工工件的相对位置![]() 为已知量。所以,要想得到最终关系式,必须首先知道
为已知量。所以,要想得到最终关系式,必须首先知道![]() 。下面以球面为例,说明
。下面以球面为例,说明![]() 的求解方法。
的求解方法。
- 上一篇文章:数控加工艺性分析
- 下一篇文章:数控加工中心编程的特点