



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于MCGS组态软件的自动化立体仓库控制系统的开发
1 引言
自动化立体仓库具有占地面积小,周转快的优点,是集信息、贮存、管理于—体的高技术密集型机电—体化产品。自动化立庠仓库主要由高层货架,堆垛机机械手、自动控制和计算机管理系统组成,他可以实现列货物自动化搬运、存取,对货物存储现代化、信息化管理等目的。MCGS(Monilorand Control GenemtedSystem)监视与控制通用系统是用于快速构造和生成上位机监控系统的组态软件系统,主要完成现场数据的采集与监测、前端数据的处理与控制。开发出用于自动化立体仓库的控制系统,它是以西门子PLC作为控制系统的核心,利用MCGS组态软件设计出自动化立体仓库上位机监控界面,MCGS组态软件通过设备驱动程序从现场硬件设备获取实时数据并处理,通过指示灯显示货物是否完成到位,并由操作人员按照要求将控制指令数据送给现场硬件设备,以控制立体仓库码垛机械手的各种动作,实现对货物的自动化存取。
2 自动化立体仓库货架的结构设计
立体仓库结构模型主要由主体货架(4层双排24仓位)。码垛机械手,主体仓位的左、右两侧配有货物人口位和出口位等组成,如图1所示。码垛机械手可以实现左右,上下和前后运动,货物放在机械手的托板上,跟随机械手运动,完成货物的存取。码垛机械手的结构简图,如图2所示。

图1 立体仓库单侧货架结构简图

图2 码垛机械手的结构简图
3 自动化立体仓库的控制部分的硬件组成
自动化立体仓库控制系统由以下几部分组成:西门子PLC控制器,手动操作面板,步进电机及其驱动模块,上位机监控面板,码垛机械手传感器和货架上限位开关等组成。操作员可以手动操作面板操作仓库运行,也可以通过上位机监控面板远程操作货物的存取。
将手动操作按键面板安装在底盘上。上面有码垛机械手运动方向控制键。可以手动操作机械手上下、左右、前后运动,货架上安装有限位开关,可以检测货物的有无,码垛机械手上安装有传感器,检测机械手的运动位置。上述各位置传感器的通、断状态作为输入信号送入PLC,经内部程序运算,再由输出端口的开、关量去控制电动机驱动模块。控制硬件结构,如图3所示。
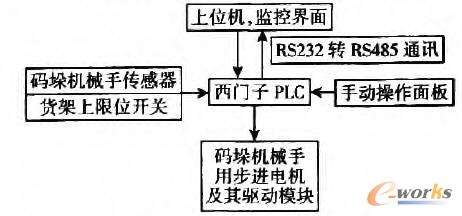
图3 自动化立体仓库倥制原理图
4 立体仓库码垛机械手动作分析
在运行时,自动化立体仓库码垛机械手的初始位置在货物人口处,当在上位机监控画面上设定好操作方式和操作货位后,点击运行,可编程控制器就按照上位机中的指令运行,输出给相应的控制电机,控制电机则按照要求转动,运送托板(货物)直到指定位置。
自动化立体仓库的工作方式有以下几种:
(1)由库取件:从立体仓库中指定位置取货物到立体仓库出口处;(2)向库放件:从立体仓库人口处取得货物并运送到指定货位;(3)倒库操作:把立体仓库中的某—个库位移到另一个库位。
自动化立体仓库码垛机械手运动控制流程图,如图4所示。
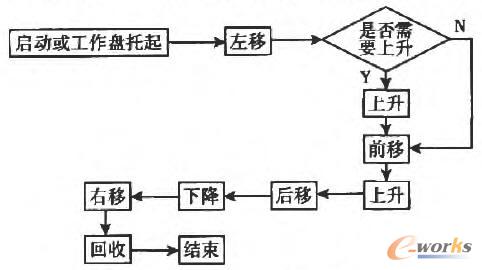
图4 立体仓库控制流程图
- 上一篇文章:PLC在数控机床控制系统的应用与开发
- 下一篇文章:基于EdgeCAM的汽车模具数控加工技术