



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种可配置的多主轴数控系统研究与开发
可配置的多主轴数控系统关键技术
对于可配置的多主轴数控铣削数控系统,除了具备基本的直线和圆弧等插补、速度平滑、图形显示、PLC逻辑控制等功能外,为完成2种模式的加工,该系统的主轴形式必须可自由配置,用户可根据所选机床模式进行相应的数控操作。对于多工件同步加工模式,关键点是调整各轴刀尖切削点使其高度一致;对于多工序轮动加工模式,关键点则是如何实现多主轴的自动对刀以及多气缸快速更换主轴操作。对于大型的龙门式铣床,还有轴双驱动同步控制要求。
1 多工件同步加工模式下刀尖齐平校准
因初始安装位置高度的不一致以及刀具长短各不相同,多轴刀具加工点的Z 轴位置一般很难保持在同一高度。为使同时加工的工件外形尺寸完全一致,需要依次调整各个主轴使各轴工件坐标相同,即保证各主轴刀尖在同一个水平面上,才能保证加工深度的一致,也就能保证加工的工件外形尺寸的完全一致。下面以3主轴数控雕铣机床为例来说明刀尖齐平校准操作的方法,设3主轴分别为Z1、Z2、Z3。
(1)分别对3个主轴进行机械回零操作,机械坐标自动置零。
(2)在工件装夹台面选择一个水平基准面,先以Z1为基准轴,在Z1刀具正下方放置一个固定对刀仪。系统通过选择开关只选择Z1轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,立即记录此时的Z1对应的对刀机械坐标值1,然后Z1轴回退至安全高度;
(3)将Z2刀具移至对刀仪正上方,然后系统通过模拟开关只选择Z2轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,立即记录此时的Z2对应的对刀机械坐标值j2,Z2轴回退至安全高度。再以上述方法再确定Z2对应的对刀机械坐标值j3。
(4)根据3主轴对应的对刀机械坐标值,即可得到各轴在Z 轴方向的偏差,此偏差将作为批量加工时保证同一加工平面的调整依据。
(5)加工前通过开关信号选择分别驱动3主轴,使3主轴回到机械原点。
(6)取出3主轴中Z1对应的对刀机械坐标值j1、Z2对应的对刀机械坐标值j2和Z3对应的对刀机械坐标值j3,判断出3个值中最大的值,因对刀点都在Z 零点以下,因此j1、j2、j3均小于0,3个值中最大的值实际就是绝对值为最小的值,以此值对应的轴为基准,然后以前述测量的各刀具的高度偏差值进行刀具长度补偿,最终使各轴刀尖处于同一水平面。
经过加工工件前各轴水平高度调整,在加工前就已使各主轴刀具刀尖处于同一高度,可以根据需要同时选择驱动全部轴或者其中某些轴,使多个主轴同步加工。因工件原点是以Z1的对刀结果为基准的,所以无论是加工前调整各轴高度还是加工期间,加工轨迹Z 方向均只统计Z1运动坐标。
2 多工序轮动加工模式下多主轴自动对刀
在进行多工序轮动加工前,必须事先进行各主轴的对刀,对刀的实质是为获取各主轴刀具的补偿值,以便在加工中换主轴时能够保持工件坐标的一致性。多主轴自动对刀步骤如下。
(1)系统以Z1为基准主轴,手工或采用寻边器自动测量其它主轴在X、Y 方向上相对基准主轴Z1的偏置距离,并记录到数控系统中,作为换刀时X 和Y 向的偏移距离依据。
(2)对整个主轴横梁进行机械回零驱动操作,机械坐标自动置零;
(3)在工件装夹台面上选择一个水平基准面,以Z1为基准轴,使能Z1气缸使Z1刀具下压到位,在Z1刀具正下方放置一个固定对刀仪;
(4)系统只选择Z 轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,系统立即记录并保存此时的Z1对应X 、Y 机械坐标值和Z向对刀机械坐标值j1,j1作为Z1轴的工件原点Z 值,然后Z1轴回退至一固定点;
(5)切换Z2刀具:根据事先设置的Z2相对Z1在X 、Y 向上的偏置距离,移动整个主轴,目的是使Z2刀尖对准原来Z1刀尖所在的X 、Y 位置,此时Z2刀尖也正对下方的固定对刀仪。系统只选择Z2轴进行驱动,低速下降,当刀尖碰到对刀仪时触发对刀到位信号,系统立即记录并保存此时的Z2对应的对刀机械坐标值j2,此机械坐标值作为Z2轴的工件原点Z 值,Z2的工件原点X、Y 值是根据Z1轴的工件原点X、Y 值以及Z2相对Z1在X、Y 向上的偏置距离自动计算获取,然后驱动Z2轴回退至固定点。
(6)以同样方式切换到Z3等其它轴,系统记录并保存对应的对刀机械坐标值j3,并计算Z3轴的工件原点X、Y 值,然后Z2轴回退至固定安全点。
(7)通过以上步骤,系统记录了各主轴的工件原点坐标值,后续轮动加工时,每个刀具将以各自的工件原点为基准进行加工,以保证各主轴刀具实际加工点处于同一个工件坐标系统。
3 多工序轮动加工模式下多气缸自动快速更换主轴
数控系统识别当前加工代码所表示的刀具,系统切换到相应刀具,比如代码中T0 ~T2分别代表主轴刀具Z1~Z3。根据当前刀具号和所需切换的刀具号,需驱动相应的汽缸和Z向伺服电机,完成切换主轴动作。主轴切换步骤如下。
(1)记录当前刀具的工件坐标值,然后回退至固定安全点,关闭该刀具气缸使刀具回缩到位。
(2)使能需切换的刀具的换刀气缸使对应刀具下压到位,根据事先设置的当前刀具以及需切换的刀具相对Z1在X、Y 向的偏置距离,计算换刀偏置移动距离,移动整个主轴支架,目的是使需切换的刀具刀尖对准原来刀具刀尖所在的X、Y 位置。
(3)取新的工件坐标系,根据记录的换刀前刀具在其工件坐标系统中Z 向的工件坐标值,计算新的刀具需移动的距离,最终使切换后的刀具到达换刀前的刀尖点,工件坐标值Z 向保持一致。
(4)按照新的工件坐标系进行加工。因加工代码一般是以同一工件坐标系进行编程设计,因此,对于同一主轴横梁上的刀具进行换刀后,实际加工工件坐标将保持一致,从而完成同一工件的不同工序加工。
(5)为了达到快速更换主轴目的,在需要更换主轴时,需更换的主轴刀具可以先行旋转启动,待主轴更换完毕,已更换的主轴刀具的转速已满足加工要求,可以立即加工,大大节省了换刀时间。
(6)加工时刀具切换后,工件坐标原点的更换使得实际的机械坐标产生偏移,如果以机械坐标作为加工轨迹显示,不同工序产生的图形将产生偏置。而工件上实际的加工点是以同一工件坐标系为基准的,因此显示轨迹时,如果是非基准轴的轨迹,需要在XYZ 三维图形上加一个反向的与工件原点相对应的偏置值,使不同工序的加工轨迹以基准轴的工件坐标加以显示,即与实际加工的工件图形保持一致。
4 Y 轴双驱同步纠偏技术
对于大型多主轴数控系统,Y 轴往往配置成双驱同步形式。在满足工作台和工件动、静态刚度的情况下,龙门柱沿导轨纵向进给,从而可以获得高的加速度特性。由于横梁及其相匹配的主轴部件并不总是形成对称结构与对称受力,尽管龙门柱两边采用完全相同的传动机构,但最终还是不能保证龙门框架移动的同步性。这种不同步性产生的机械耦合可能使龙门框架或驱动元件受到损坏,机床产生强烈振动[7-8]。因此,Y 轴双驱同步进给技术至今尚未很好解决。
本系统采用一种自适应控制方法,对于双Y 各自设置独立的控制系统,系统采用主从工作方式。当系统受不平衡负载或扰动影响,其参数或性能发生了较大的变化。通过检测主动轴状态和从动轴状态之间的误差,经过自适应规律产生的反馈作用来修改主动轴和从动轴控制器的参数,产生的辅助控制量输入到各自自适应控制系统中,同时分别调整2个控制器,使二者在速度上保持一致。2个控制器自身不但能抑制扰动,还具有相互协调的能力。
可配置的多主轴数控系统加工验证
(1)多工件同步加工。
一次装夹,利用多主轴可以加工多个零件。图3所示为采用多主轴加工机床,数控系统配置为多工件同步加工模式,材料为铝合金,选用R3球头铣刀,一次同时加工3个手机零件。经加工验证,加工出的3个零件外形尺寸一致,达到精度要求。对于加工效率,同样加工参数条件下,因只需一次装夹准备以及空移机床等操作时间,实际加工效率将提高3倍以上。考虑到机床变形以及负载力的增大,这种机床主轴不能无限增多,一般一台机床最多3~10个主轴。
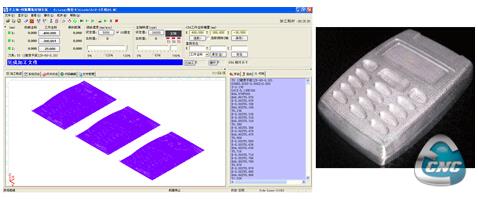
图3 多工件同步加工验证
(2)多工序轮动加工。
如图4所示,采用多工序三气缸换主轴机床,数控系统配置为多工序轮动加工模式,材料为铝合金,选用R3球头铣刀,一次装夹,同时完成工件的毛坯开粗、精加工、钻孔工序。通过气缸驱动更换主轴,一道工序完毕转换到另一工序,完成整个零件的加工。一般的刀库换刀方法必须在刀具停止旋转的基础上换刀,换刀时间大部分花在等待前一工序刀具停止和后一工序刀具启动上,造成总体加工效率降低。而更换主轴的方式可以在需要更换主轴时,后一工序刀具可以先行启动,待主轴更换完毕,已更换的主轴刀具的转速一般已满足加工要求,可以立即加工,大大节省了换刀时间。

图4 多工序轮动加工验证
结束语
本文提出的一种可自由配置的多主轴数控系统,可根据实际多主轴机床主轴配置形式的加工需要,进行多主轴的驱动控制,完成多工件同步加工或多工序轮动加工2种驱动方式的自由配置。在多工件同步驱动配置方式下,为了使同时加工的工件外形尺寸完全一致,可以在加工前依次调整3个轴,保证各主轴刀尖在同一个水平面上,从而保证加工的多个工件外形尺寸的完全一致。在多工序轮动驱动配置方式下,因换工序换刀后,可以保证刀具加工点处于同一个位置,这样能在同一工件上完成不同工序的加工。轮动驱动换刀时只需移动后续工序刀具到前序刀具加工点,省略常规的换刀夹持操作,同时又消除了主轴电机停止和启动等待时间,大大节省了换刀时间。该数控系统不仅仅可应用于多主轴铣削控制,也可为激光加工、超声加工等复合加工预留了扩展通道。加工结果验证表明该数控系统能自由配置多工件和多工序2种加工方式,柔性较高,在大批量工件加工和工序较少的多工序加工场合,具有较大的实际应用价值。
- 上一篇文章:深度解读3D打印(增材制造)技术
- 下一篇文章:槽型凸轮数控加工工艺