



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于SERCOS接口的开放式数控系统
二、系统的软硬件平台构建
(一)硬件平台。基于SERCOS接口的开放式数控系统硬件要求:(1)PC机;(2)SERCOS接口;(3)光缆机;(4)伺服驱动器;(5)伺服电动机。其中伺服驱动器和伺服电动机的数量根据用户的需要选择。
SERCOS卡属于一种即插即用的计算机通用接口卡,将会形成环路基于I/O和驱动之间,这个环路即为SERCOS接口环路,采用光纤传输技术实现连接。I/O站作为输入输出模块,对按钮、输出等进行控制,光缆环与I/O的连接通过连接模块实现,连接米快同样也是通讯转接单元,通讯信息的处理采用的是Soft SERCOS,因此SERCOS卡是被动式主控卡。基于软件功能基础不但实现硬件系统的控制功能,还具有较强的开放性,因此此项开放式数控系统的硬件结构相对较简单。
(二)软件平台。开放式数控系统软件要求:(1)实时操作子系统 RTX5.0;(2)Windows Nt4.0,要求内存至少为32兆,通常情况下要求内存64兆;(3)具有实时内核的Borland C++5.0;(4)Soft SERCOS。结构如图2所示。
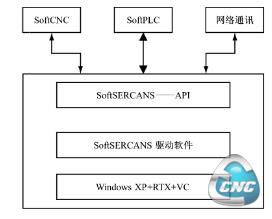
图2 基于SERCOS接口的开放式数控体系的软件平台结构示意图
由于高速度、高精度数控系统在通常情况下都会要求具备较高的实时性,所以一般会保持在1ms范围内,本次研究的数控系统利用RTX5.0软件对系统进行实时性控制。
在RTX5.0软件中心增加了一个RTX实时子系统,即RTSS,RTSS拥有独立的Api和执行环境,但它不能利用NT的调度,执行的是自己的实时线程调度,且多有的线程调度经在Windows任务调度之前。RTX包括HAL,也就是进行了抽象扩展的实时性硬件扩展层,对于RTSS、NT之间的中断绝缘性的实现应用HAL完成。RTSS还有屏蔽Windows中断的功能。而且实时HAL还具备基本异常处理、软件中断机制等性能。
RTX API基于Win32 API基础,只要开发者熟悉Win编程,就可以利用其作为开发工具,对于部分Win32 API来说RTX都支持,语法上,RTAPI具备了更好的实时性。RTSS进程可以实现和C Run Time Libraries的静态链接,于此同时RTX还支持Unicode。不过它并不是对所有的Win32函数均支持,所以通常情况下至少包含了2个进程,一个基于Win32,一个基于RTSS,确保了实时性。设备管理、内存管理、时钟和定时器、内部进程通信、中断管理、文件输入输出管理以及进程与线程管理均属于RTX函数的内容。
三、总结
基于SERCOS技术,利用SERCOS卡通过SERCOS接口开发开放式数控系统,将系统的动态性、开发性极大的提升了,采用RTX5.0软件实现了系统实时性控制,更加方便CNC开发者的应用及工作。
- 第1页:基于SERCOS接口的开放式数控系统(1)
- 第2页:系统的软硬件平台构建
- 上一篇文章:一种基于BP神经网络的数控机床伺服系统控制器
- 下一篇文章:同一数控系统双屏显双刀架单独实现数控技术