



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一种基于BP神经网络的数控机床伺服系统控制器
2、神经网络控制
2.1 生物神经元的结构
神经元,又称神经组织,是构成神经系统结构和功能的基本单位,是大脑处理信息的基本单元,以细胞体为主体,由许多向周围延伸的不规则树枝状纤维构成。它主要由细胞体(Cell body)、树突(Dendrite)、轴突(Axon)和突触(Synapse)组成。
2.2 人工神经元网络
人工神经元网络ANN,也简称为神经元网络,是由大量处理单元互联组成的非线性、自适应信息处理系统。它是在现代神经科学研究成果的基础上提出的,试图通过模拟大脑神经网络处理、记忆信息的方式进行信息处理。人工神经网络具有非线性、非局限性、非常定性、非凸性四个基本特征,它是涉及神经科学、思维科学、人工智能、计算机科学等多个领域的交叉学科,具有自学习、联想存储、高速寻找优化解等功能,并在很多领域已得到了很好的应用,并与模糊逻辑、专家系统、遗传算法、小波分析、混沌、粗集理论、分形理论、证据理论和灰色系统等融合,越来越多的应用到控制领域的各个方面,因为它为解决大复杂度问题提供了一种相对来说比较有效的简单方法,对于数控系统这种较为复杂的控制系统,引入神经网络的控制方法可以更好的增强数控系统的稳定性。
2.3 单神经元控制器在交流伺服系统中的应用
依据交流伺服系统的控制性能要求,可以设计出图2所示的单神经元自适应PID控制器。
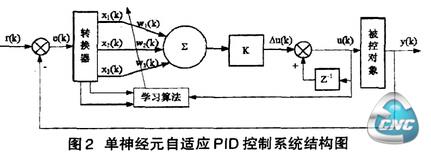
图中转换器的输入反映被控过程及控制设定的状态,r(k)为设定值,y(k)为输出值,x1(k),x2(k),x3(k)为经转换器转换成的单神经元学习控制所需要的状态量;wi(k)为对应于xi(k)的加权系数;K为神经元的比例系数,K>0。
2.4 BP神经网络在交流伺服系统中的应用
BP(Back Propagation)神经网络是20世纪80年代年由Rumelhart和McCelland为首的科学家提出的,是一种按误差逆传播算法训练的多层前馈网络,由信息的正向传播和误差的反向传播两个过程组成的,是应用最广泛的神经网络模型之一。BP网络能学习和存贮大量的输入-输出模式映射关系,不需要预先揭示描述的映射关系的数学方程。它的学习规则是使用最速下降法,通过反向传播不断调整网络权值和阈值,使网络误差平方和最小。
BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer)。输入层神经元负责接收外部输入信息,并传递到中间层每个神经元;中间一层为内部信息处理层,负责信息转换,根据信息变化能力需求,中间层可以设计成单隐层或多隐层的结构,最后一个隐层传递到输出层各神经元的信息,经进一步处理后,完成一次学习的正向传播处理过程,由输出层向外界输出信息处理结果。当实际输出与期望输出不符时,进入误差的反向传播阶段。误差通过输出层,按误差梯度下降的方式修正各层权值,向隐层、输入层逐层反传。周而复始的信息正向传播和误差反向传播过程,是各层权值不断调整的过程,也是神经网络学习训练的过程,这个过程一直到网络输出误差降低到可以接受的水平,或者预先设定的学习次数为止。
BP网络由于其具有逼近任意非线性函数的能力,而且结构和学习算法简单明确,当与传统的PID控制器相结合后可以直接对被控对象进行闭环控制,并且可以使k p、k i、k d三个参数在线整定;神经网络也可以根据数控系统的运行状态对PID控制器的三个可调参数k p、k i、k d通过神经网络的自学习调整权系数,从而使其稳定状态对应于某种最优控制基于BP神经网络的PID控制器结构示意图如图3所示:
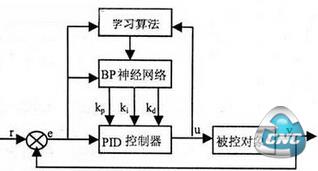
图3 基于BP神经网络的PID控制器结构示意图
3、结语
本人针对常规PID控制器的不足,以神经网络PID控制理论为基础,设计了单神经元自适应PID控制器和基于BP神经网络的PID控制器,为仿真做好了准备。
本文只是提出了BP神经网络对在数控交流系统中的控制器的设计方法,并未对其进行仿真,故其性能还未可知,故需进一步对其性能进行仿真研究,以确定此控制器在实际应用中的效果。
- 第1页:一种基于BP神经网络的数控机床伺服系统控制器(1)
- 第2页:神经网络控制
- 上一篇文章:西门子802D数控系统黑屏故障维修实例
- 下一篇文章:基于SERCOS接口的开放式数控系统