



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

交流伺服驱动器集成设计平台相关研析
伺服控制器设计
根据IRMCS201设计平台所提供的伺服驱动控制器硬件设计参考,可设计出如图3所示的伺服驱动控制器。
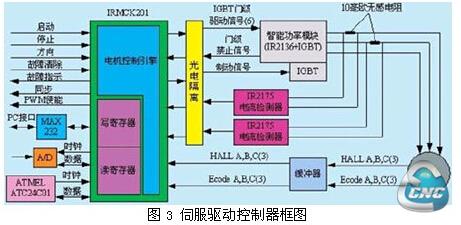
主机接口
IRMCK201芯片提供了RS232/RS422/485、SPI接口或8位并行接口与外部主机通信,RS232/RS422/485通信方式可以编程 选择。通过MAX232电平转换芯片,RS232接口允许PC主机直接对MCK201寄存器的内容进行配置和监控系统的运行状态。不同通信方式通常都处于激活状态,可以相互切换,但不能同时运行。
电机控制接口
IRMCK201芯片具有6路SVPWM输出,通过光耦与IR2136芯片驱动三相桥式逆变器的功率开关器件IGBT,也可以与智能功率模块直接接口。驱 动芯片IR2136具有防止同一桥臂直通逻辑,以及欠压、过流关闭所有输出的功能。IRMCK201提供了与IR2175线性电流传感芯片的直接接口引 脚,IR2175的最大输人电压为260mV,具有将模拟输入信号转换为130kHzPWM信号的能力。
IRMCK201带有编码器接口电路,编码器脉冲数从200~10,000个转,脉冲频率可高达1MHz,可以方便地组成速度伺服控制系统。它可以与多种编码器连接,可接收有相互正交的ENA、ENB信号及零点标志信号,以及三路HALL信号输人,这三路路信号既可以独立使用,也可以复用。系统上电 时,IRMCK201可以通过HALL传感器信号及Z脉冲位置估计出永磁同步电动机转子磁极的初始位置。
控制输入与状态指示接口
IRMCK201具有控制输入与状态指示等数字IO引脚。控制输人信号包括启动、停止、运转方向、故障清除等;状态指示信号包括系统故障指示、PWM输出 使能、同步指示等。
串行存储器接口
IRMCK201具有串行存储器接口,芯片上电复位后自行通过I2C总线读取存储器中所配置的数据,而不需主机干预。因此,系统可以在没有主机控制的情况下单独运行,其初始化数据通过读取串行存储器的内容得到。
控制器参数配置
利用安装在PC机上的ServerDesigner软件工具,将电机参数和控制参数下载到MCK201中的寄存器中,完成控制系统的配置,不需要软件编 程。电机参数包括额定转速、绕组的电阻、电感、额定电流、电机惯量、极数、空载电流值、编码器精度和类型,对于永磁同步电动来说,还有电压常数、转矩常数。控制参数包括PI调节器参数、加减速时间,以及PWM载波频率和死区时间等。
结语
对先进的马达控制器而言,随着应用范围与转速要求的持续成长,发展商需要快速配置解决方案以满足日益提升的效能要求。一个包含了最佳化的模拟控制、电力切换及驱动技术,以及基于高效能硬件的数字控制的运动控制设计平台,便能够同时解决开发时程与效能要求的问题。而随着可简单构装的缓存器的单芯片数字控制器 出现,对于缺少专业的软件或电力系统设计能力的人而言,这个控制器可以降低其设计风险。
- 第1页:交流伺服驱动器集成设计平台相关研析(1)
- 第2页:伺服控制器设计
- 上一篇文章:国产数控系统助力智能制造
- 下一篇文章:自适应加工数控技术在数控加工领域的分类与应用