



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控机床开环伺服进给系统的PLC控制
2 开环伺服系统的PLC控制
2.1 步进电机开环控制系统控制参数
使用PLC控制步进电机伺服机构,关键是控制步进电机的输入脉冲数、输入脉冲频率、输出脉冲的顺序这三个参数,达到控制移动部件的行程小、进给速度、进给方向。
2.1.1 行程控制
工作台的行程控制是利用直线光栅尺采用数字控制来实现。工作台的行程正比于步进电机的总转角,只要控制步进电机的总转角就可控制工作台的行程。由步进电机的工作原理和特性可知步进电机的总转角正比于所输入的控制脉冲个数,因此,应由伺服机构的位移量确定PLC输出的脉冲个数,设
PLC输出的脉冲个数为N:
N=TL/δ (1)
式中:TL——伺服机构的位移量(ITlm);8——伺服机构的脉冲当量(mm/脉冲)
2.1.2 进给速度控制
伺服机构的进给速度取决于步进电机的转速,而步进电机的转速取决于输入的脉冲频率,因此,因由工序要求的进给速度,确定其PLC输出的脉冲频率,设PLC输出的脉冲个数为f:
F=Vf/60δ (Hz) (2)
式中Vf-一伺服机构的进给速度(mm/min)
2.1.3 进给方向控制
改变步进电机的转向即可控制进给方向。步进电机的转向是通过改变步进电机各绕组的通电顺序来改变的,设三相步进电机通电顺序为A—AB—B— BC—C—CA—A? 时步进电机正转,当把绕组的通电顺序改变为A—AC—C—CB—B—BA—A?时,步进电机将反转。因此可以通过PLC输出的方向控制信号改变硬件环行分配器的输出顺序来实现通电顺序的改变,或经编程改变输出脉冲的顺序来改变步进电机绕组的通电顺序。
2.2 PLC控制的方法
2.2.1 结构
利用德国西门子公司的S7—200PLC,产生脉冲实现步进电机控制,由控制电路、驱动电路、步进电机三部分构成,如图5所示。
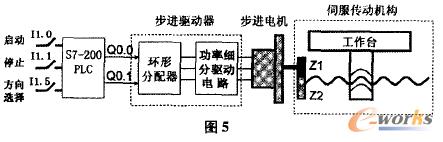
2.2.2 PLC
用于产生脉冲,控制电机的速度和转向。如S7— 200PLC的CPU214有两个脉冲输出,可以用来产生控制步进电机驱动器的脉冲。S7—200CPU本体已含有高速脉冲输出功能,CPU脉冲输出频率达20KHz-100KHz,可以用来驱动步进电机或伺服电机,完成控制要求。
2.2.3 驱动电路
由脉冲信号分配和功率细分驱动电路组成,根据控制器输入的脉冲和方向信号,为步进电机各绕组提供正确的通电顺序,以及电机需要的高电压、大电流,同时提供各种保护措施,如过流、过热等保护。功率驱动器将控制脉冲按照设定的模式转换成步进电机线圈的电流,产生旋转磁场,使得转子只能按固定的步数来改变它的位置。连续的脉冲序列产生与其对应同频率的步序列。使控制频率足够高,步进电机的转动就为一个连续的转动。
2.2.4 步进电机
控制信号经驱动器放大后驱动步进电机,带动负载。当输入端I1.0发出“启动” 信号后,S7—200PLC的Qo.0的输出脉冲触发步进电机驱动器。控制器输出放大了的固定数目方波脉冲,使步进电机按对应的步数转动。当输入端I1.1发出“停止”信号后,步进电机停止转动。接在输入端I1.5的方向开关位置决定电机正转或反转。
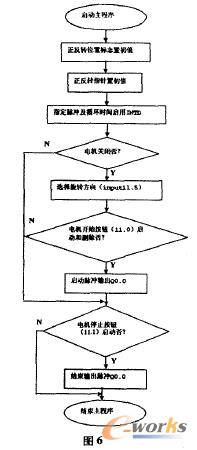
2.3 PLC软件设计
在程序的编制中,为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值。在反转时也如此。这样,当步进电机换向时,就将上一次的位置作为起点反向运动,避免了电机换向时产生错步。其程序流程框图如图6所示。
- 第1页:数控机床开环伺服进给系统的PLC控制(1)
- 第2页:开环伺服系统的PLC控制
- 第3页:PLC控制完成的功能
- 上一篇文章:卧式铣镗加工中心数控技术分析与发展前景
- 下一篇文章:五轴联动数控铣床高效加工螺旋浆曲面