



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

影响直接驱动数控转台伺服刚度的因素分析
(2)改变系统速度环比例增益Kp,使其从1开始以30为步长逐渐增加到500,其余系统参数不变,系统的Bode图变化如图4所示,随着Kp的增加,系统在低于5×103Hz的中低频段的幅值在相应减少,而在其他频段内,Bode图幅值基本没有变化,说明随着Kp的增加系统抵抗中低频段干扰的能力在增加,与此同时,随着Kp的增加,bode图幅值也趋于平稳,系统趋于稳定。可见,在适当范围内增加系统位置环比例增益可以对系统中低频干扰有明显抑制作用,也会提高系统稳定性。
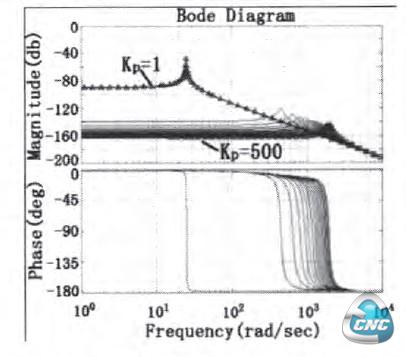
图4速度环比例增益Kp变化时的系统bode
(3)改变系统速度环积分时间常数Tn,使其从0.001开始以0.01为步长逐渐增加到0.1,其余系统参数不变。系统的Bode图变化如图5所示。

图5速度环积分时间常数Tn变化时的系统bode图
随着Tn的增加,系统在低于103Hz的低频段的幅值在相应增加,而在其他频段内,Bode图幅值基本
没有变化,说明随着Tn的增加系统抵抗低频段干扰的能力在减少,伺服动刚度降低。与此同时,随着Tn的增加,bode图幅值变化程度基本不变,可见,在适当范围内降低速度环积分时间常数值可以对系统低频干扰有明显抑制作用,而Tn的取值对系统的稳定性影响不大。
(4)改变系统转动惯量J,使其从0.001开始以10为步长逐渐增加到150,其余系统参数不变,系统的Bode图变化如图6所示。
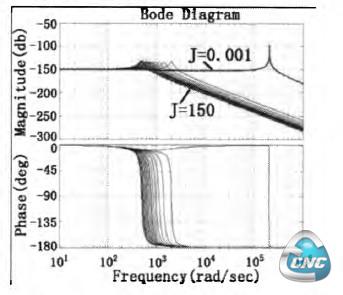
图6位置环比例增益J变化时系统bode图
随着J的增加,系统在高于5×102Hz的中高频段的幅值在相应减少,而在其他频段内,Bode图幅值基本没有变化,说明随着J的增加系统抵抗中高频段干扰的能力在增加,系统动刚度增加,与此同时,随着J的增加,bode图幅值也趋于平稳,系统趋于稳定。可见,在适当范围内增加系统位置环比例增益可以对系统中低频干扰有明显抑制作用,也会提高系统稳定性。
3 结论
为了得到控制系统参数对伺服动刚度的影响,提高直接驱动数控转台的伺服动刚度,使用Bode图分析系统伺服动刚度的方法,可以得到如下结论。
(1)对于低频扰动,可以通过适当增加位置环比例增益、速度环比例增益或者降低速度环积分时间常数来提高系统伺服动刚度,对于中频扰动,可以通过适当增加位置环比例增益、速度环比例增益、系统转动惯量或者降低速度环积分时间常数来提高系统伺服动刚度,对于高频扰动,可以通过适当增大系统的转动惯量来提高系统伺服动刚度。
(2)虽然以上分析系统伺服动刚度的方法是针对直接驱动数控转台系统,但该分析方法具有普遍应用的意义,同样可以应用在其他电动机驱动的系统中,以提高系统伺服动刚度。
- 第1页:影响直接驱动数控转台伺服刚度的因素分析(1)
- 第2页:系统伺服刚度分析
- 上一篇文章:三菱FX2N系列PLC在注塑机全自动控制系统中的应用
- 下一篇文章:高性能交流伺服系统中的控制方法