



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于CANopen协议的数字伺服电钒在效控系统中的应用研究
4 PCI-CAN卡读写操作的软件设计
CANopen主站的软件设计主要包括两部分,1)CANopen数据帧的内部处理;2)与从站进行数据交换的通信软件模块。前者在第3节中作了介绍。后者主要有两方面功能:一是控制收发缓冲区的读写,二是对PCI-CAN卡内部CAN控制器的相关寄存器进行初始化配置,包括协议寄存器、消息对象接口寄存器等。
CAN数据信息帧的数据类型定义如下面一段程序所示。
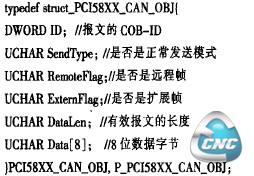
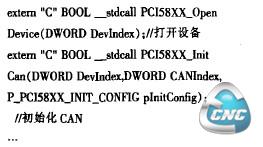
PCI-CAN卡一共提供了打开与关闭设备、初始科CAN、复位CAN、发送与接收数据、获取缓冲区尚未诊取的帧数等10余个接口函数。在使用时将文科PCIS8XX.h和PCIS8XX.lib放人工作目录下,通过以下方法进行声明后就可以调用了。
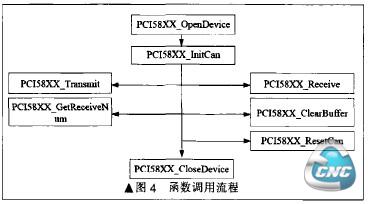
函数的调用流程如图4所示,需要先打开PCI-CAN卡,然后对其进行初始化,之后就可以进行数据的发送与接收以及对PCI-CAN卡中的缓冲区进行清空等操作。
5 基于CANopen协议的数字伺服电机控制实现
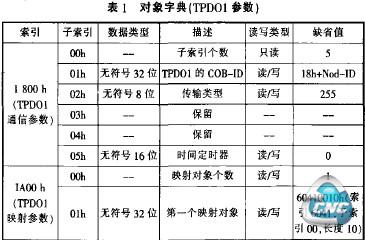
要对基于CANopen协议的数字伺服电机进行运动控制,首先设定PDO通信参数和映射参数,这是通过5D0进行的。以IDM640-8EIA型数字伺服驱动器的TPDO1的对象字典为例,如表1所示.对象字典中1800h号索引对应的是TPDO的通信参数,从中可以看出,TPDO1的COB-ID为180h+Node-ID,数据类型为8位无符号数,可通过时间定时器触发。1A00h号索引对应的是TPDO的映射参数。映射参数将TPDO数据的具体意义指向索引6041h,在子索00h的对象字典处定义了TPDO数据每一位所代表的意义。
PDO的通信参数和映射参数配置完成以后,按照所配置的映射参数要求向数字伺服发送携带运动控制指令的报文,即可控制数字伺服电机的运行。
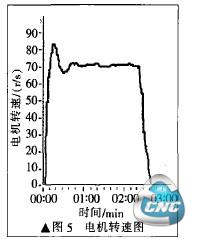
本研究所进行的试验对象是以一个数字伺服电机为从站、工控机和PCI-CAN卡为主站的单主从网络,在网络初始化以及对象字典配置完成之后,通过RPD04刘数字伺服电机进行启停控制,用测速仪对电机转速进行测试,结果如图5所示,电机在CANopen主站的控制下启动,达到预定转速70r/s后,经过2.5min电机停转。实验结果表明,CANopen主站能成功控制基于CANopen协议的数字伺服电机的运转。
6 结束语
本文利用CANopen高层协议实现了主站与数字伺服之间的数据通信,为多轴、高速数控系统数据传输提出了一种解决方案,改变r传统的模拟量控制模式,改用数字伺服系统,对多轴多通道数控机床的研究具有重要的意义。
- 上一篇文章:发格8070数控系统在多主轴平面钻床上的应用
- 下一篇文章:CNC机床伺服系统中模糊自整定PID控制研究