

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于伺服电机和PLC的工作台运动控制
本文以西门子S7--200PLC作为控制器.控制伺厦电机带动丝杠螺母剐运动,从而实现工作台的运动控翻,通过合理的系统教硬停设计和控捌工艺设计,利用伺服电机的高控制精度和滚珠丝杠螺母副的高传动精度,保证工作台商精度的运动控朝。
3.2 可缟程控制器的接线
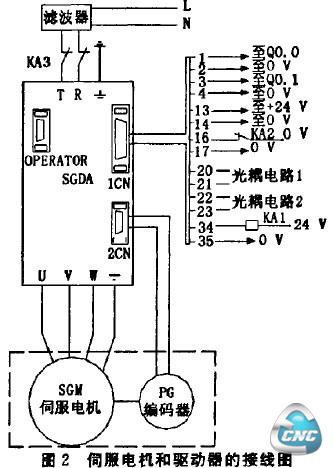
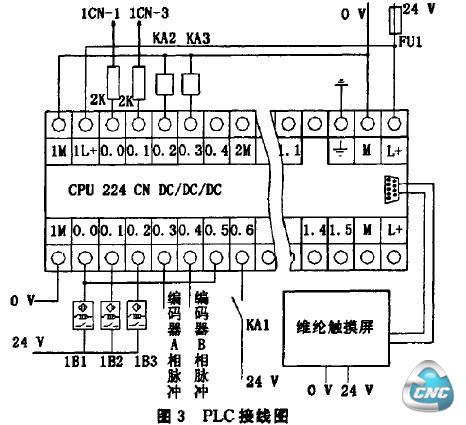
可缩程控制器输入输出为直流信号,利用Q0.0输出口产生高速脉冲信号,并连接到伺服驱动器1CN—l引脚,Q0.1作为方向控制信号接驱动器1CN—3引脚。在接线时由于PLC输出为DC24V信号,为保证电流在额定值以内,需在输出电路上串接2kN电阻。接近开关IBl作为零点定位接到I0.0,行程限位IB2、183分别接到I0.1和I0.2。当电机发生故障报警时,KAl线圈失电,Qo.3有输出,KA3线圈得电,从而断开伺服驱动器,使电源电路起到保护作用。利用PLC的高速计数器HSC4对伺服电机编码器反馈位移量进行计数,编码器为A、B相增量式编码器,输出电压5V,经过光电耦合电路提高输出A、B相时钟信号电压使之大于12V,然后接到PLC输入点I0.3、I0.4。PLC的接线如图3所示。
程序编写下载好之后,将维纶触摸屏串口数据线接到PLC串口上,实现PLC和HMI的通信。

4 驱动器参数设置
几个重要的伺服驱动器参数设置如下:cn-0lbit0=0,cn-0lbit2=O,cn-0lbit3=1;cn-02bit0=0,cn-02bit3,4,5=000;cn-24=8192,cn-25=5000;电子齿轮比=cn-24/cn-25,cn-24=编码器脉冲数×4,cn-25=负载轴每旋转一圈的负载移动量所对应的脉冲数。因丝杠导程为5mm,cn-25=5000,则驱动器每接收到一个指令脉冲负载移动量为1um。
- 第1页:基于伺服电机和PLC的工作台运动控制(1)
- 第2页:可缟程控制器的接线
- 第3页:PLC软件程序设计
本文为授权转载文章,任何人未经原授权方同意,不得复制、转载、摘编等任何方式进行使用,e-works不承担由此而产生的任何法律责任! 如有异议请及时告之,以便进行及时处理。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:五轴数控机床回转中心的几何误差检测与补偿
- 下一篇文章:基于Powermill的五轴加工中心后处理模块