



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

伺服电动机的振动抑制
2 转矩脉动抑制方法
转矩脉动(Torqtle Ripple)也叫转矩波动、转矩振动(Tourque Vibration),是由转矩时大时小引起的振动。根据转矩脉动产生的机理不同,采用的转矩脉动抑制的方法主要有如下两种:一种是电动机本体的优化设计,通过气隙磁场,定转子结构.绕组形式等的合理设计来消除齿槽转矩,使反电动势波形接近理想波形;另~种是从控制策略入手,通过调整加在定子绕组上的电压或电流波形来抑制转矩脉动。比较典型的抑制转矩脉动的方法有:谐波消除法、直接转矩控制和智能方法等。
2.1 典型转矩脉动抑制方法分析
2.1.1谐波消除法
电流中谐波使电流波形变形,谐波的存在会引起谐振,对电动机振动影响很大。谐波消除法主要是对电流中的主要谐波进行补偿,达到消除谐波从而减小振动的目的。针对非正弦反电动势和锯齿波导致的永磁同步电动机扭转振动Damien J.Hill等人提出了一种在扭矩和传感器输入之间利用任何传感器的线性传递函数的控制方法。该方法属于转矩波动补偿的迭代方法,使用该方法转矩在幅度上的变化低于2%,关键的转矩谐波至少减少了l/3,但是该方法只对20和24次谐波进行了补偿。从文中的分析中可以看出,lO次和50次谐波对转矩振动的影响也较大,因此,该方法还可以进一步改进,对10次和50次谐波进行谐波补偿。
廖勇等人提出了一种谐波注入的方法在PMW三相调制参考电压波形中加入相应的谐波分量来抵消电动机电流中的谐波。该方法和上述方法不同之处在于选择的谐波次数不同,该方法选择5、7次谐波进行消除。作者通过分析发现5、7、1l、13等次谐波对永磁电动机的影响较大,因此选择了前两次谐波加以补偿。该方法具有与DamienJ.HilI提出的方法相同的缺陷,仍可继续对ll和13次谐波进行补偿,从仿真结果来看,Damien J.HiU的仿真结果比廖勇的要好。且与传感器类型无关。
Jin—Wook Reu等提出类似的方法,该方法通过IPM电动机空隙磁通密度散布情况来消除负三次谐波以实现振动最小化的方法。该方法利用有限元方法来计算振动的变化,分析扭转振动源,结合加速度传感器来实现振动的抑制。
2.1.2直接转矩控制(DTC)
直接转矩控制(DTC)采取定子磁链定向,利用两点式进行调节直接对电动机的磁链和转矩进行控制,使电动机转矩迅速响应。直接转矩控制方法最早是针对感应电动机提出的。直接转矩控制是采用磁链定向和空间矢量概念。通过检测定子电压、电流.直接在定子坐标系下观测电动机的磁链、转矩并将此观测值与给定磁链、转矩相比,差值绛两个滞环控制器得到响应的控制信号再综合当前磁链状态从开关表中选择合适的电压空闯向量来控制逆变器的电子开关的状态,直接时电动机转矩实施控制。
周永勤提出了一种基于转矩分配的模糊PI控制器的方法来实现参数在线优化调整的方法。该方法采用一种综合控制策略,用双闭环控制,外环为速度控制,用模糊PI控制器;内环为转矩跟踪控制。方法能够提高系统动态响应,具有良好的动静态性能,并抑制转矩脉动,且应用到了实际工程,可供别的系统借鉴。
滑模结构在自控领域的应用越来越广,在转矩脉动控制中也得以应用。杨俊华提出了一种引进滑模变结构的控制策略,用转矩和磁链两个滑模控制器代替了传统直接转矩控制中的两个滞环控制器。该方法能减小转矩脉动,改善定子磁链和电流波形,在保持直接转矩控制固有的转矩快速响应优点的同时提高了系统的稳定性,且具有鲁棒性,但是该方法对系统的控制状态要求频繁、快速的切换。同样具有滑模变结构的方法有马宪民根据变结构控制理论提出的采用滑模一PI变结构的控制策略,该策略有助予克服非线性因数对系统的影响,减小了转矩脉动,降低了噪声并且提高了系统的鲁棒性。
2.1.3智能控制及其他方法
一些智能方法也应用于转矩控制,比如模糊算法、神经网络和迭代算法、遗传算法等。采用模糊算法的系统能够减少电动机的转矩和磁通脉动,抑制转矩脉动系数;单神经元构成的控制器相对于神经网络来说结构简单,计算量少,易于计算机实现,具有在线自学习能力,具有自适应能力,对扰动的鲁棒性好;迭代学习控制算法简单,在控制过程中不需要预知被控系统模型和参数的特点,具有记忆和修正机制,对系统参数依赖性低,抗干扰性好。由此可见,智能算法普遍具有抗干扰性,自适应和鲁棒性。
另外还有PTC(Pefct Tracking Contml,完善的跟踪控制)法,无涟波转矩控制方法,利用傅里叶变换汹棚1的迭代控制。PTC方法把转矩脉动用关于转子角度的函数表示,最终把转矩脉动的抑制问题转化成了速度控制的问题,方法实用且能在速度变化的同时不必调节参数。具有很好的自适应能力和鲁棒性。无涟波转矩控制方法对包括了3相不平衡情况的相电流进行了优化,能获得优化的电动机激励电流,该方法也可以认为是另一种谐波电流注入法。相对简单明了,不用考虑相位变化,对反电动势的形状、量级和半波对称等没有特殊要求。采用傅里叶变换的迭代方法补偿信号麓在线获得。可适用于不同电动机,具有自适应性,鲁棒性强,但是该方法的缺点是计算量大,且相电压和d/q轴电流较其他控制方法波动大。
2.2转矩脉动抑锚方法比较
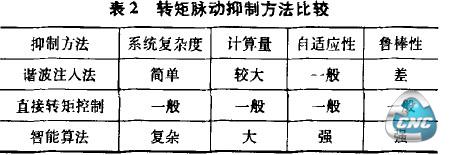
综上所述,谐波注入法跟其他方法相比,针对性较强,能很好地消除特定型号电动机的转矩脉动,系统结构较篱单,计算量较大,鲁棒性最差;直接转矩控铋法,响应迅速,是基本的消除转矩脉动的方法,可以和其他方法复合控制;智能算法自适应性好,抗干扰能力强,医此鲁棒性强,计算量最大。几种主要转矩脉动抑制方法在系统复杂度、计算量、自适应性和鲁棒性上比较结果如表2所示。
3 总结与展望
本文大量总结了近几年关于振动抑制方法的文献,具有较强的时效性。将针对不同类型振动所提出的振动抑制方法进行了分析和总结,从横向和纵向对不同方法的不同特性加以对比,且以图表的形式呈现,方法的优劣性对比直观,一目了然。
振动抑制经过多年的发展,从传统的PID控制方法到结合了人工智能方法的控制方法的出现,完善了各种抑制方法中的鲁棒性、自适应性等问题,使整个控制系统具有良好的自适应性和强鲁棒性等优点,已经日趋完善,但仍有一些问题亟待解决:(1)结合了人工智能算法的控制方法计算量大,复杂的计算势必影响系统的响应。结合以上对扭转振动和转矩脉动等抑制方法的分析,把振动抑制的方法规以改进使其具有快速响应的特点,使振动抑制方法能应用于更广泛的领域,让电动机传动系统朝着高速高精的目标发展。(2)产生振动的原因很多,导致振动类型多样化.系统中可能包含一种以上类型的振动,如果只针对某种振动进行抑制,对其余类型的振动抑制效果可能并不明显,因此,找出一种抑制由多原因弓l起的振动的方法有其必要性。
- 第1页:伺服电动机的振动抑制(1)
- 第2页:转矩脉动抑制方法
- 上一篇文章:取长补短看 中国机床工业如何凸显自身特色
- 下一篇文章:基于参数辨识的交流伺服速度环参数自整定