



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于MSP430F149的变频伺服系统的设计与研究
3系统软件设计
为方便系统维护与升级,系统软件设计采用模块化程序结构,主要有主程序、电机伺服中断服务程序、测速服务子程序等组成。
3.1主程序
主程序在完成系统初始化后,进入上位机通信查询及显示子程序循环,等待中断的发生,电机速度采集采用定时中断方式来实现。主程序流程图如图3a所示。
3.2电动机伺服中断程序
变频电机伺服中断程序由MSP430F149内部定时器A完成中断并且执行,电机控制中断程序流程图如图3b所示。
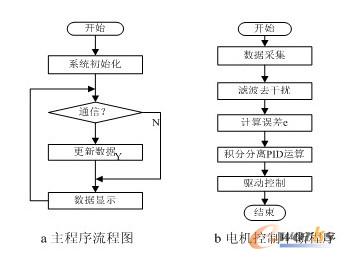
图3程序流程图
3.3数字PID调节器设计
在数字PID调节控制系统中,加入积分校正后,系统会产生过大超调,这是伺服系统所不允许的[6-7]。为减少超调对控制系统动态性能的影响,需要在电机伺服过程中的启动、停车或大幅度偏离给定时采用积分分离PID控制算法,只加比例、微分运算取消积分校正。而当被控制量接近给定值时,才使用积分校正以消除静态误差。为减少超调量,提高系统的稳态控制精度,使系统拥有较高的控制品质本伺服系统引进积分分离PID控制算法。具体算法实现如下:
(1)根据实际情况,设定阀值ε>0。
(2)当 时,采PD控制,避免系统过大超调,同时使系统有较快响应速度。
时,采PD控制,避免系统过大超调,同时使系统有较快响应速度。
(3)当 时,采用PID控制,可保证伺服控制的精度。
时,采用PID控制,可保证伺服控制的精度。
控制算法公式:

4结束语
本文设计的交流变频伺服系统将新一代高速单片机MSP430F149与台达转矩控制变频器VFD-V型相结合,基于上位机通讯方式进行控制,提高了系统的可控性能及稳定性,以单片机代替了传统的PLC控制,并与上位机联动进行系统参数调节,实现了良好的人机人机交互平台,同时降低了系统的开发成本以及周期,并在实际应用中取得良好的控制精度及可靠性能,为伺服系统设计开发提供了更好的系统解决方案。
- 上一篇文章:基于PLC的单神经元PID控制器的设计与实现
- 下一篇文章:基于hyperMILL自动编程五轴刀路的数控加工