



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

伺服调整工具调试配置华中8型数控系统
而提高整个伺服系统的响应及刚性,可以减小硬轨带来的滞后延时影响。使得后续在圆度调试中的过象限突跳补偿更加容易补偿。
【速度环积分时间常数】的大小影响电机稳态速度误差的大小及速度环系统的稳定性。
速度环比例增益、积分时间常数仅对电机在运行时的状态起作用,所以我们可以使用较高的测量速度测试,观察加速波形来判断速度环比例增益是否需要进一步提高。如下图所示:
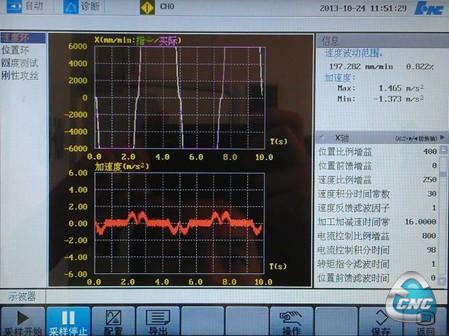
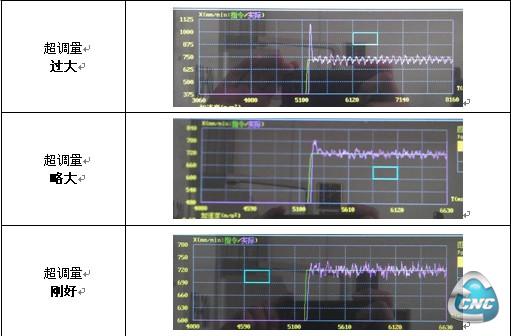
速度环参数调整的原则:是保证速度环系统稳定(不振荡)的前提下,允许超调并只有一个超调量不大的波头,使速度环响应最快,并且系统稳定工作。如下列三幅图中的第三幅图所示:
速度环积分时间常数调整的原则:为了保证系统稳定的工作,应该调整速度环积分时间常数。调整的原则是,负载惯量折算到电机轴上的值与电机转子惯量的倍数越大,速度环积分时间常数的值应增加越大。
逐步提高速度环比例增益,以提高机床响应速度。
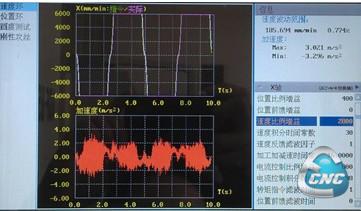
而伺服电机带上实际负荷时,由于实际负载转矩和负载惯量的增大,会使速度环的带宽相对空载时变窄。在较高的速度环增益下,实际负荷较大的机床(硬轨机床),更容易发生电机工作不稳定而引起的振荡现象。如下图所示:
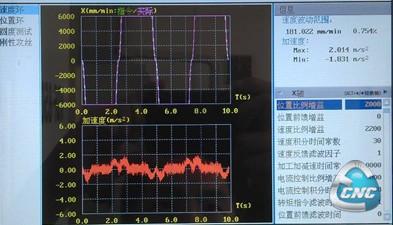
此时需要略微降低速度环比例增益,使之进入稳定状态,然后逐步提高位置环比例增益,直至再次出现不稳定的情况,再适当降低直至稳定。这样伺服系统便获得了一个稍微较高的刚性和响应速度。如下图所示:
3 抑制振荡类的参数调整:
由于硬轨机床的特性,往往导致此时我们获得的刚性和响应速度还不足够,判断条件为:在“位置环”采集项中使用1000mm/min的进给速度移动该轴,观察跟踪误差最大值是否在0.2mm以内。当然该项指标能控制的越小越好。
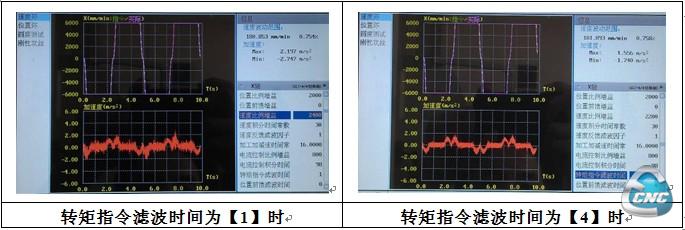
若惯量相对较大的机床可增加【速度环反馈滤波因子】及【转矩指令滤波时间】这两项参数,可有效降低振荡,使得速度环比例增益可进一步提升。速度环反馈滤波因子缺省值为1,一般情况下最大调整到4;而转矩指令滤波时间缺省值为1,一般情况下最大调整到10。如下列两幅图所示:
- 第1页:伺服调整工具调试配置华中8型数控系统(1)
- 第2页:伺服调整工具调试配置华中8型数控系统(2)
- 第3页:特性优化调整