



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于现场总线的可重构数控系统的研究
2.2 PROFIBUS—DP总线时间特性分析
PROFIBUS—DP采用单一的总线存取协议,通过开放式系统互联(0pen System Interconnect,OSI)参考模型的第2层实现,包括数据的可靠性以及传输协议和报文的处理。在PROFIBUS—DP中,这一层被称为现场总线数据链路(Fieldbus DataLink,FDL),但实际上由介质存取控制(MediumAccess Control,MAC)子层来具体控制数据传输的程序,并且保证在任何时刻只能有一个站点设备发送数据。这也是PROFIBUS—DP协议设计旨在满足的基本要求。
在复杂的自动化系统(主站)间通信,必须保证在确切的时间间隔中,任何一个站点都要有足够的时间来完成通信任务;而在复杂的主控制器和简单的I/O设备之间,应尽可能快速而又简单地完成数据的实时传输。因此,PROFIBUS—DP的总线存取协议包括主站与主站之间的令牌传递方式和主站与从站之间的主从方式。
数控系统在处理某些连续任务过程中,对实时性的要求很高,如复杂轨迹曲线连续控制和现场关键信号的采集等。因此,必须对PROFIBUS—DP的时间特性进行分析,为数控系统设计提供依据。
图3是一个单主站PRoFIBUS—DP系统在不同通讯速率下,总线通信循环时间随从站点数量增加的变化趋势。假设每个DP从设备有2 byte的输入和2 byte的输出数据,最小的从间隔时间是200μs,TID1一75 TBit,TSDR一11 TBit。显然,从站数量是决定总线循环时间的主要因素,但相对而言,高速传输受到的影响就很小。图4描述了总线上用户数据通讯流程和数据格式,以此为例来计算和分析总线上的信息循环时间。
一个8位二迸制数(1 byte)按11位传输,电文头和尾由11 byte或9 byte组成,因此,当波特率为1.5 M时,1 TBit为0.666 7μs(1个8位二进制数-11 TBit-7.33μs);当波特率为12 M时,1 TBit为83 ns(1个8位二进制数-11 TBit—0.913μs)。
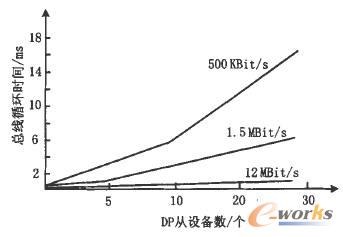
图3 PRoFIBUS—DP单主站系统的通信循环时间
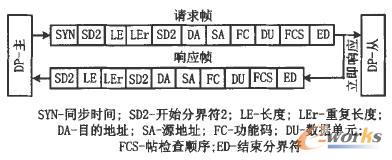
图4 PRoFIBUS—DP用户数据交换原理
一般考虑到现场传输环境和延迟,在实施中还要加上约10%~20%的余量。主从通讯信息循环时间的具体计算公式如下:
TMc-(TSYN+TID1+TSDR+Hender+I×11+O×11)×Slaves。
式中,TMc为信息循环时间,按位时间计;TSYN为同步时间,典型的为33 TBit;TID1为在主站的空闲时间,典型的为75 TBit;TSDR为在从站的站延迟时间,最小值为11 TBit,最大为60 TBit至800 TBit不等,典型的为11 TBit;Hender为在请求和响应帧中的电文头,198 TBit;I为每个从站的输入数据字节数;O为每个从站的输出数据字节数;Slaves为从站个数。
对于一个单主站的数控系统方案,包含1个CNC控制器主站、4个伺服驱动器从站(4轴控制)、1个主轴驱动器从站、2个I/O模块从站、1个人机交互(Human Machine Interface,HMI)单元、2个监控单元从站,则共有1个主站,10个从站。假定每个从站有10 byte的输入和10 byte的输出,则TMc-(33+75+11+198+110+110)×20=10 740 TBit。
1.5 M波特率下,1 TBit需要0.66μs,从而10 740 TBit需要10 740×0.66μs=7.1 ms;
12 M波特率下,1TBit需要0.083μs,从而10 740 TBit需要10 740×0.083μs=0.9 ms。
一般来说,数控系统在进行位置控制时,要求位置环的闭合时间在2 ms以内,所以上面的系统设计在1.5 M波特率时,无法满足要求。因此,要么提高总线传输速度到12 M波特率的水平,要么简化从站的输入输出字节的数量。
- 上一篇文章:数控车床安全操作规程
- 下一篇文章:PLC与触摸屏在开齿机数控系统中的应用