

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
文章推荐
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

工业机器人如何和数控机床配合工作?
本文论述了FANUC机器人在电机外壳加工生产线上的应用过程,采用机器人自动上下料技术及利用iRVision视觉系统,合理地规划机器人运动轨迹,把工业机器人搬运技术及数控机床加工技术有机地组合起来,实现自动装卸工件、自动码放加工成品,实现产品的高精度、高效率和低成本加工。
⑤工件在翻转台进行交换后,机器人R1把加工成品放置在下料传送带上,如图11所示,由机器人R2进行工件下料、自动码放在成品料筐中,如图12所示。
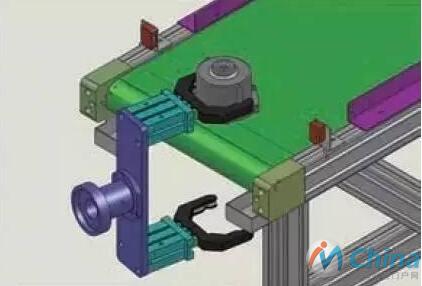
图11 复合手爪将成品工件放到下料输送带上

图12 单手爪将成品工件从下料输送带上取下
至此, 结束一个完整的加工流程。各加工工序有相应的节拍,经过调整CNC加工程序以及机器人动作程序后,可实现数控机床加工与机器人上下料的完美组合。
5.专用夹具设计
依据三台数控机床各自的加工工序任务,设计三套组合气动夹具,介绍如下。
(1)立式加工中心1专用夹具:立式加工中心1进行钻孔、攻如图13所示。
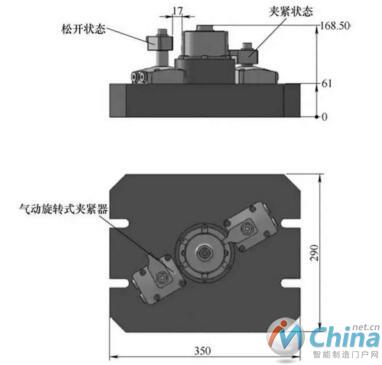
图13 加工中心1夹具
(2)立式加工中心2 专用夹具:立式加工中心2进行钻6个φ 5.5mm的通孔、孔口倒角工序加工,设计以气动三爪自定心卡盘夹紧工件,以两个弹性V形块定向的夹具,如图14所示。

图14 加工中心2夹具
1.启动卡盘 2.支承块 3.弹性V形块 4.特制卡爪
(3)数控车床专用夹具:数控车床进行内孔及台阶孔、孔口倒角工序加工,设计以一面两销定位工件、以气动旋转夹紧器夹紧方式的夹具,如图15所示。
6.机器人、P LC与数控机床的接口
为保证机器人与数控机床的安全配合,要建立机器人、PLC以及数控机床之间安全可靠的通信连接。在硬件方面,通过屏蔽电缆将三者之间相应的输入与输出点进行连接。软件方面,通过机器人专用软件、PLC接口,采集机床和机器人当前状态,编写相应的符合上下料逻辑的控制程序,最终达到数控机床与机器人的有效通信。重点需要处置紧急停止信号、数控机床准备完成信号、机器人手爪气动信号、数控机床夹具松夹信号以及安全门信号等,数控机床状态监控画面如图16所示。
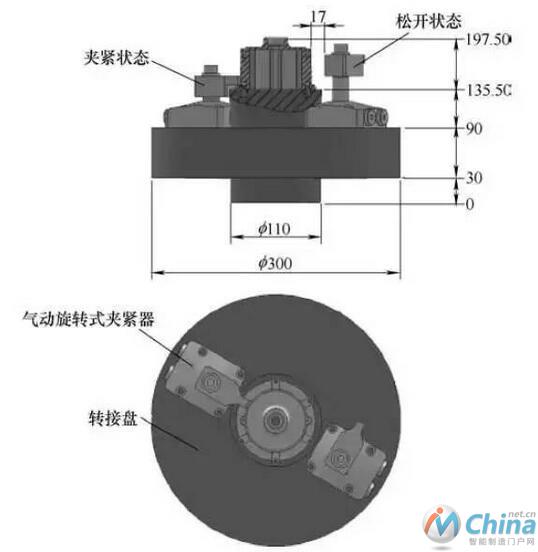
图15 数控车床夹具

图16 数控机床状态监控画面
7.结语
随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范围还在不断地扩大,工业机器人自动上下料机构作为数控机床辅助部件,越来越受到机床制造商和用户的重视。通过机器人控制系统和机床控制系统之间快速无误的通信,以及机器人运动的精度,可保证系统加工过程的可靠性。
本文所述自动加工生产线,汇集机器人技术、PLC技术、传感器检测技术、通信技术及数控技术等先进技术,实现了工业机器人与数控机床的技术组合,简化了数控机床操作模式,提高了数控机床的操作安全性,降低了工人的劳动强度,工件的上下料及自动加工连接紧密,大大提高了工作效率,具有较好的应用价值。
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:深入解读焊接机器人发展趋势
- 下一篇文章:机床数控化改造过程中应注意的问题