

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
文章推荐
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

一文详解:工业机器人结构、驱动及技术
机器人的基本工作原理是示教再现;示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。
㈢、旋转传动机构
采用旋转传动机构的目的是将电机的驱动源输出的较高转速转换成较低转速,并获得较大的力矩。机器人中应用较多的旋转传动机构有齿轮链、同步皮带和谐波齿轮。
1、齿轮链
(1)转速关系
(2)力矩关系
2、同步皮带
同步带是具有许多型齿的皮带,它与同样具有型齿的同步皮带轮相啮合。工作时相当于柔软的齿轮。
优点:无滑动,柔性好,价格便宜,重复定位精度高。
缺点:具有一定的弹性变形。
3、谐波齿轮
谐波齿轮由刚性齿轮、谐波发生器和柔性齿轮三个主要零件组成,一般刚性齿轮固定,谐波发生器驱动柔性齿轮旋转。 主要特点:
(1)、传动比大,单级为50—300。
(2)、传动平稳,承载能力高。
(3)、传动效率高,可达70%—90%。
(4)、传动精度高,比普通齿轮传动高3—4倍。
(5)、回差小,可小于3’。
(6)、不能获得中间输出,柔轮刚度较低。
谐波传动装置在机器人技术比较先进的国家已得到了广泛的应用。仅就日本来说,机器人驱动装置的60%都采用了谐波传动。
美国送到月球上的机器人,其各个关节部位都采用谐波传动装置,其中一只上臂就用了30个谐波传动机构。
前苏联送入月球的移动式机器人“登月者”,其成对安装的8个轮子均是用密闭谐波传动机构单独驱动的。 .德国大众汽车公司研制的ROHREN、GEROT R30型机器人和法国雷诺公司研制的VERTICAL 80型机器人等都采用了谐波传动机构。
㈣、机器人传感系统
1、感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。
2、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。
3、智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。
4、对于一些特殊的信息, 传感器比人类的感受系统更有效。
㈤、机器人位置检测
旋转光学编码器是最常用的位置反馈装置。光电探测器把光脉冲转化成二进制波形。轴的转角通过计算脉冲数得到,转动方向由两个方波信号的相对相位决定。
感应同步器输出两个模拟信号——轴转角的正弦信号和余弦信号。轴的转角由这两个信号的相对幅值计算得到。感应同步器一般比编码器可靠,但它的分辨率较低。
电位计是最直接的位置检测形式。它连接在电桥中,能够产生与轴转角成正比的电压信号。但是,由于分辨率低、线性不好以及对噪声敏感。
转速计能够输出与轴的转速成正比的模拟信号。如果没有这样的速度传感器,可以通过对检测到的位置相对于时间的差分得到速度反馈信号。
㈥、机器人力检测
力传感器通常安装在操作臂下述三个位置:
1、安装在关节驱动器上。可测量驱动器/减速器自身的力矩或者力的输出。但不能很好地检测末端执行器与环境之间的接触力。
2、安装在末端执行器与操作臂的终端关节之间,可称腕力传感器。通常,可以测量施加于末端执行器上的三个到六个力/力矩分量。
3、安装在末端执行器的“指尖”上。通常,这些带有力觉得手指内置了应变计,可以测量作用在指尖上的一个到四个分力。
㈦、机器人-环境交互系统
1、机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。
2、工业机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。也可以是多台机器人、多台机床或设备、多个零件存储装置等集成 。
3、也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
㈧、人机交互系统
人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置。 该系统归纳起来分为两大类: 指令给定装置和信息显示装置。
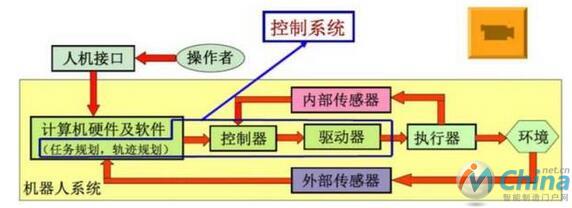
五、 机器人的控制系统
1、机器人的控制系统
“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。
2、机器人示教原理
机器人的基本工作原理是示教再现;示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数/工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作;
3、机器人控制的分类 :
1)按照有无反馈分为:开环控制、闭环控制;
开环精确控制的条件:精确地知道被控对象的模型,并且这一模型在控制过程中保持不变。
2)按照期望控制量分为:位置控制,力控制,混合控制 ;
位置控制分为:单关节位置控制(位置反馈,位置速度反馈,位置速度加速度反馈)、多关节位置控制、多关节位置控制分为分解运动控、集中控制;力控制分为:直接力控制、阻抗控制、力位混合控制 ;
3)智能化的控制方式 :模糊控制、自适应控制、最优控制、神经网络控制、模糊神经网络控制 、专家控制以及其他;
4、控制系统硬件配置及结构:
由于机器人的控制过程中涉及大量的坐标变换和插补运算以及较低层的实时控制,所以,目前的机器人控制系统在结构上大多数采用分层结构的微型计算机控制系统,通常采用的是两级计算机伺服控制系统。
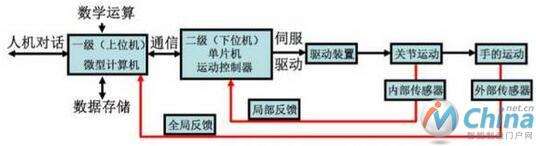
1)具体流程:
主控计算机接到工作人员输入的作业指令后,首先分析解释指令,确定手的运动参数。
然后进行运动学、动力学和插补运算,最后得出机器人各个关节的协调运动参数。这些参数经过通信线路输出到伺服控制级,作为各个关节伺服控制系统的给定信号。关节驱动器将此信号D/A转换后驱动各个关节产生协调运动。 传感器将各个关节的运动输出信号反馈回伺服控制级计算机形成局部闭环控制,从而更加精确的控制机器人手部在空间的运动。
2)基于PLC的运动控制 两种控制方式:
1、利用PLC的某些输出端口使用脉冲输出指令来产生脉冲驱动电机,同时使用通用I/O或者计数部件来实现电机的闭环位置控制。
2、使用PLC外部扩展的位置控制模块来实现电机的闭环位置控制主要是以发高速脉冲方式控制,属于位置控制方式,一般点到点的位置控制方式较多。
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:我国工业机器人需跨业融合以走向高端
- 下一篇文章:深入解读焊接机器人发展趋势