

最新新闻

热点文章
我要投稿

联系电话:027-87592219/20/21转188
投稿邮箱:tb@e-works.net.cn
投稿邮箱:tb@e-works.net.cn
文章推荐
视频推荐

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

ABB机器人在激光切割领域的相关技术应用
相对于传统的加工方法,机器人激光切割系统在满足精确性要求的同时,能很好地提高整个激光切割系统的柔性,占用更少的空间,具有更高的经济性和竞争力。
二、相关应用案例
ABB2600型机器人所构建的激光切割系统很好地体现了ABB机器人在激光切割应用领域相关的技术,下面以此为应用案例进行介绍。
系统组成
机器人激光切割系统外部布局和内部布局分别如图4和图5所示。整个系统主要由ABBIRB2600机器人及MTC750转台(图6a)、IPG激光器及水冷设备(图6b)、Precitec激光切割头(图6c)、RIP烟尘净化设备组成(图6d)。
1)IRB2600机器人具有同类产品中最高的定位精度及加速度,可确保高产量及低废品率从而提高生产率。所切割的钣金件安放在MTC750转台上。应用ABB机器人的MultiMove功能,机器人和转台能够协同运动,且能达到很高的运动精度,从而保证工件的激光切割精度。
2)激光发生器及水冷设备选用IPG公司的,型号为YLS-1000,激光最大功率为1000W。激光采用光纤传输,经聚焦后作为切割热源,使工件被照射处的材料迅速熔化,同时用与激光束同轴的高速气流来吹除熔融物质,以形成空洞,随着光束与材料沿一定轨迹作相对运动,从而使孔洞连续形成一定形状的切缝,完成对工件的激光切割。
3)激光切割头选用Precitec公司YRC型切割头,该切割头除了具有用来聚焦激光的聚焦透镜以及相应的光纤插口、水冷和气体连接口外,还具有高度传感器,能够进行防碰撞保护和自动浮动调焦。该功能可以有效地提高激光切割质量。

除此之外,为了防止激光切割过程中所产生的激光辐射和烟尘污染,2600机器人和MTC750转台都放置在工作房内,整个加工过程在工作房内进行,用于观察切割过程和上下料的窗口均采用特制的激光防护玻璃,产生的烟尘在加工过程中利用RIP净化设备及时抽走,从而保证了整个激光切割系统的安全性。
系统特点
1)采用ABB离线编程与仿真技术,显著缩短了整个系统的编程和调试的时间,提高了整体生产效率。大部分机器人编程均可在RobotStudio环境下完成。首先将相关的机器人、转台模型,以及Precitec激光切割头、所加工工件的三维模型导入到RobotStudio中,应用AutoPath功能根据工件形状模型自动生成编程路径,必要时进行路径优化和碰撞检测。然后通过虚拟运行机器人程序,在RobotStudio虚拟三维环境中能够直观的观察机器人的运动路径,以便进行修改和调整。最后将确定好的机器人程序下载至实际的机器人控制器中,进行少量的实际调试即可完成整个系统的机器人编程。实际生产中应用该技术,无论是投产还是换线,机器人编程均可提前准备就绪,大大降低了在生产现场调试和停机中断生产的时间,提高了生产效率,扩大了机器人系统投资回报。
2)采用ABB机器人TrueMove和QuickMove技术,最大程度地保证了机器人的运动精度和速度。同时利用AdvancedShapeTuning对2600机器人6个轴的摩擦力进行补偿,提高了机器人自身运动精度,最大程度地降低了机器人运动误差对激光切割质量的不良影响。
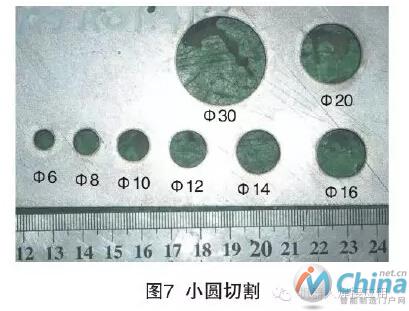
3)高质量的激光切割效果除了要求机器人自身应具有很高的运动轨迹精度外,良好的切割工艺也是必备因素。切割工艺涉及到切割速度和加速度、激光功率、焦点位置、吹气量等多种因素的综合调节。图7为工艺调整后切割出的小圆,直径分别为Φ6,Φ8,Φ10,Φ12,Φ14,Φ16,Φ20,Φ30,可以看出切割后的小圆热变形很小,边缘光洁,无明显缺陷。经测量,小圆的轨迹误差约为0.1~0.25mm,说明基于ABB机器人的激光切割系统具有很高的运动精度和切割精度。
三、结束语
ABB机器人激光切割系统既具有机器人运动灵活,柔性高的特点,又具有激光切割的切割速度快、质量好、切缝窄等优点,很好地满足了现代制造业发展的要求;同时借助ABB机器人在激光切割领域的相关技术,不仅在技术上能够满足复杂三维切割的要求,有助于提高工业产品的质量水平,同时降低了生产成本,能够给企业带来巨大的经济效益。
本文来源于互联网,e-works本着传播知识、有益学习和研究的目的进行的转载,为网友免费提供,并以尽力标明作者与出处,如有著作权人或出版方提出异议,本站将立即删除。如果您对文章转载有任何疑问请告之我们,以便我们及时纠正。联系方式:editor@e-works.net.cn tel:027-87592219/20/21。
- 上一篇文章:什么叫喷涂机器人?种类特点都有哪些?
- 下一篇文章:【盘点】国产喷涂机器人系统集成商十强