



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

工业机器人常用精密减速器技术分析
谐波减速器
谐波减速器由三部分组成:谐波发生器、柔性论和刚轮,其工作原理是由谐波发生器使柔轮产生可控的弹性变形,靠柔轮与刚轮啮合来传递动力,并达到减速的目的;按照波发生器的不同有凸轮式、滚轮式和偏心盘式。谐波减速器传动比大、外形轮廓小、零件数目少且传动效率高。单机传动比可达到50-4000,而传动效率高达92%-96%。
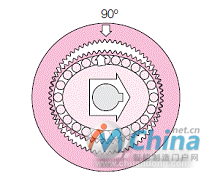
HarmonicaDrive产品结构示意图
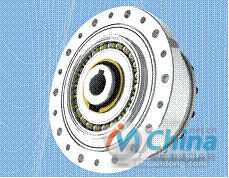
HarmonicaDriveCSF-LW系列产品
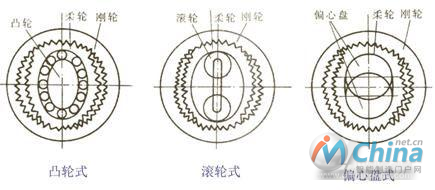
三种常见的谐波减速器类型

谐波传动啮合示意图

普通齿轮传动啮合示意图
行星减速器
行星顾名思义行星减速器就是有三个行星轮围绕一个太阳轮旋转的减速器。行星减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性;是一种用途广泛的工业产品,其性能可与其它军品级行星减速器产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
精密减速器在工业机器人上的作用
工业机器人的动力源一般为交流伺服电机,因为由脉冲信号驱动,其伺服电机本身就可以实现调速,为什么工业机器人还需要减速器呢?工业机器人通常执行重复的动作,以完成相同的工序;为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。因此,提高和确保工业机器人的精度就需要采用RV减速器或谐波减速器。精密减速器在工业机器人中的另一作用是传递更大的扭矩。当负载较大时,一味提高伺服电机的功率是很不划算的,可以在适宜的速度范围内通过减速器来提高输出扭矩。此外,伺服电机在低频运转下容易发热和出现低频振动,对于长时间和周期性工作的工业机器人这都不利于确保其精确、可靠地运行。
精密减速器的存在使伺服电机在一个合适的速度下运转,并精确地将转速降到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。与通用减速器相比,机器人关节减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。
相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手部;行星减速器一般用在直角坐标机器人上。
减速机的市场现状
目前应用于机器人领域的减速机主要有两种,一种是RV减速器,另一种是谐波减速器。在关节型机器人中,由于RV减速器具有更高的刚度和回转精度,一般将RV减速器放置在机座、大臂、肩部等重负载的位置,而将谐波减速器放置在小臂、腕部或手部。对于高精度机器人减速器,日本具备绝对领先优势,目前全球机器人行业75%的精密减速机被日本的Nabtesco和Harmonic Drive两家垄断(业界俗称RV减速机和谐波减速机),包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。其中Harmonic Drive在工业机器人关节领域拥有15%的市场占有率。
据行业人士介绍,一台精密减速器四大国际巨头采购价为3万元~5万元,卖给国内关系好的客户约7万元,关系一般的普通客户约12万元,内资企业采购精密减速机的成本比国际巨头贵一倍还多,可见其间的利润差别有多大。
2013年全球工业关节类机器人减速器的出货量为73万台,同比增长6%。目前全球精密减速器市场基本上被日本的纳博特斯克和德国的Harmonica Drive所垄断。据上海机电的公告,日本的纳博特斯克2012年销售收入约30亿、全球市场份额稳居60%。
值得一提的是,日本纳博特斯克公司从1980年代初提出RV型设计到1986年RV减速器研究获得实质性突破,花了6-7年时间;而国内率先出结果的南通振康和恒丰泰花费时间也为6-8年;可以看出,技术是没有捷径可走的。换句话说,国内RV减速器现在的发展水平还停留在日本八十年代后期。
据行业内不具名人士透露,ABB、发那科、安川、库卡等国际主流机器人整机厂商均由以上两家日本公司提供减速机,并且与两家公司有着非常苛刻的合作条件,即在使用这两家公司产品时不能再使用别家的产品,否则将解除合作关系。
南通振康去年的年产量是200多台,产品已被多家机器人厂商试用,包括国外的ABB、KUKA、发那科以及国内的埃夫特、埃斯顿等企业等。其中,埃夫特已经通过试用后购买了几百台RV减速器产品。
核心零部件一直限制这中国机器人的快速发展,因此早日实现加速器的国产化至关重要。
- 上一篇文章:远程就可管控车间设备沈阳机床让“指尖工厂”成现实
- 下一篇文章:2015年我国机器人行业现状分析