



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

基于RTLinux的全数控软件并联机床数控系统研究
4 基于RTLinux的数控软件数控系统设计
RTLinux 系统提供了抢占式多任务调度机制,并将系统分为实时域和非实时域两部分,实时性要求较低的任务可置于非实时域中运行,实时性要求较高的任务置于实时域中运行。而RTLinux 实现多任务调度主要通过两种方式:多进程和多线程。进程拥有自己独立的运行环境(寄存器和地址空间等),而线程是一个进程中的一个执行分支,各线程从属于同一进程,共享同一地址空间。RTLinux 系统允许多个线程并行执行,并采用CPU 的时间分片和基于优先级的调度策略实现多线程调度,因而大大提高了系统和程序的运行性能。
在本系统中,利用RTLinux提供的多线程技术,通过为数控系统每个任务创建一个线程,由系统对各线程的运行进行协调切换,很好地解决了系统实时多任务调度问题。按实时性要求将数控系统的操作任务进行了划分。
(1) 总体控制任务:作为系统调度的核心,对各任务模块进行统一的管理,协调各任务的高效运行。该任务放在RTLinux 系统的非实时域内运行。
(2) 人机界面管理任务:根据用户的操作或总体控制任务发来的信息在屏幕上完成相应的坐标显示、状态显示、轨迹仿真、菜单和对话框显示、程序编辑、参数设定、文件管理等子任务。这些任务的实时性要求不高,将这些功能模块放在RTLinux 系统的非实时域内运行。
(3) 轨迹规划任务:接收到系统发出的运行指令后,对运动轨迹进行规划,包括代码解释、刀具补偿、速度过渡、虚实变换等子任务。这些任务对实时性要求较高,因此将这些功能模块放在RTLinux系统的非实时域内运行,并将其优先级设为最高。
(4) 运动控制任务: 系统完成底层控制的核心单元。包括轨迹插补、主轴控制、实轴伺服控制、I/O控制、状态监控、数据采集几项子任务。这些任务的实时性要求最高,因而将这些功能模块放在RTLinux 系统的实时域内运行。
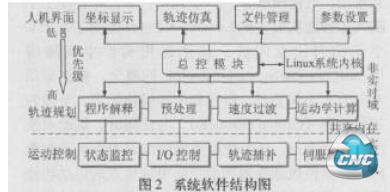
图2 系统数控软件结构图
在数控软件设计中,数控系统以上四个主要任务对应系统中的四个进程,每个进程中又由不同线程以实现不同的子任务。系统运行期间,上述四个进程始终处于并行运行状态,人机界面管理、轨迹规划和运动控制进程由总体控制进程统一进行调度,通过消息触发与总体控制进程实现交互,并根据系统的操作需求在进程内部创建和终止相应的线程(子任务)。图2示出了实现数控系统实时多任务调度的数控软件结构图。
在这种体系结构中,各功能模块间已不是传统的调用与被调用的关系,每一模块都是独立的线程,一经创建,便独立运行于系统中,各线程具有不同的状态属性以及对不同时间、事件的响应策略。这样,系统的四个进程以及进程内部各线程既独立并行运行,又相互协调配合,从而实现了数控系统的各项功能。
5 结论
由于并联机床数控系统的轨迹控制与传统机床不同,因此要解决其系统开放性的问题,必须采用NC 内核的开放,全数控软件数控则是实现NC 内核开放的最为有效的途径。本文研究了全数控软件数控系统构造的理论和方法,以高性能PC 为硬件平台,基于RTLinux 操作系统和C 语言为数控软件平台,开发了全数控软件化的并联机床数控系统。