



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控机床刀架虚拟装配仿真系统的设计与实现
2.4 实现的技术路线
根据系统所要实现的上述任务,确定本文实现LDB4数控电动刀架虚拟装配仿真系统的技术路线为:
a.利用三维几何建模软件构建设备模型,并对模型的品质等进行优化。
b.将三维模型输出为EON Studio能够识别的文件格式。通过三维几何建模软件和虚拟现实软件的数据接口,将模型转入到系统开发平台中,检查产品的初始模型是否正确,进行数据反馈和修改。通过可视化显示与分析,实现装拆项目的加载。
c.进行装配路径和零部件运动轨迹的规划.生成装配序列并记录序列信息。装配路径的规划包括装配约束的定义、装配定位和装配序列规划等,从而实现系统的运动仿真和设备拆装的自动演示。
d.创建基于装配序列和装配路径交互式虚拟装拆模块,在虚拟装拆的过程中提供相关知识信息。
LDIM数控机床刀架虚拟装配仿真系统的技术路线如图2所示。
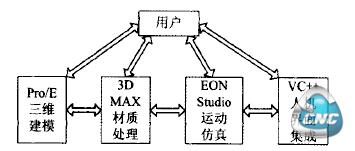
图2 LDB4数控机床刀架虚拟装配仿真系统技术路线图
3 刀架装拆的虚拟仿真过程模拟
完成的LDIM数控机床刀架虚拟装配仿真系统如图3所示。图3(a)为LDB4数控机床刀架仿真模型,图3(b)为LDIM数控机床刀架虚拟装配仿真系统的爆炸图。系统直观地表达出零部件之间的装配关系与装配意图,为虚拟装配做准备。装配模型中主要零部件及装配顺序规划如下:下刀体组件及中轴组件→电源线接线柱→上刀体组件→压簧→离合销→销→离合盘→平面轴承→止退圈→定位键叶锁紧螺母→螺钉→ 发讯盘→小螺母→磁钢组件→螺钉→上罩→螺钉→防水垫→防水螺钉。LDB4数控机床刀架虚拟装配仿真系统操作及模块功能示意如图4所示。操作者可根据此运动仿真模型了解刀架结构组成、零部件之间的装配关系,进行快速装配或拆卸模拟,如图4(a)所示。亦可在虚拟环境下进行刀架装配或拆卸练习。以装配练习模块为例,当操作者将鼠标靠近任意一个零件,系统即自动显示该零件的基本信息,并提示装配路径中该零件所涉及到的相邻零部件。虚拟装拆过程中的装配体信息提示如图4(b)所示。
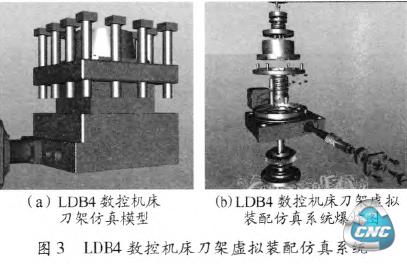
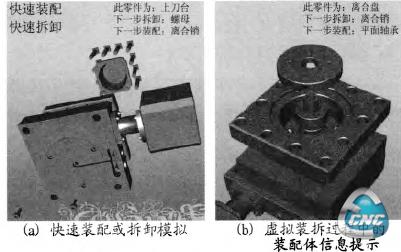
图4 LDB4数控机床刀架虚拟装配仿真系统
操作及模块功能示意如操作者未按正确路径进行装配或拆卸操作,系统会进行报错提示,同时部件无响应。
4 结论
基于本文的研究工作可以得出以下基本结论:
a.借助虚拟现实技术,以LDB4数控机床刀架的拆装为例,开发了具有交互功能的虚拟装配仿真系统。系统通过人机交互的方式,对装配体的组成零部件进行结构和装配序列的认知以及实时运动仿真。为产品装配过程的设计、规划和分析提供了平台;为利用虚拟现实技术辅助进行产品设计和教学训练提供了可借鉴的途径。
b.系统以EON Studio作为仿真环境,利用VC++6.0进行了二次开发,实现了软件之间的对接,为虚拟仿真问题的开发工具选择提供了参考。
c.进一步扩充和完善现有的虚拟仿真系统,深入研究虚拟现实技术,实现机械产品沉浸式的交互仿真,是今后进一步的研究方向。
- 上一篇文章:基于PMAC的数控系统软件开发研究
- 下一篇文章:走近木工机床数控软件