



投稿邮箱:tb@e-works.net.cn

- 未来汽车工厂,在线下单支持私人定制
- 2018-02-02

- 基于云端的三维CAD系统Autodesk Fusion 360
- 2018-01-31

- 通过PTC物联网技术实现Flowserve泵的预测性维护
- 2018-01-31

- 微软预测性维护保障电梯高效服务
- 2018-01-30

数控机床电气维修技术
2.数控机床运动坐标的电气控制
数控机床一个运动坐标的电气控制由电流(转矩)控制环、速度控制环和位置控制环串联组成。其控制框图如图2。
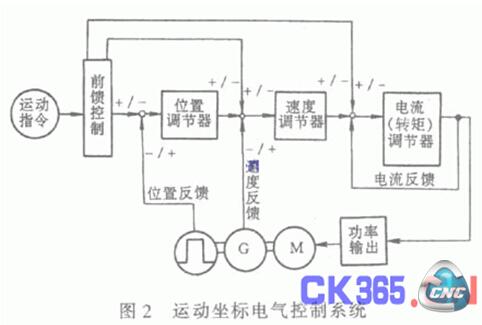
(1)电流环是为伺服电机提供转矩的电路。一般情况下它与电动机的匹配调节已由制造者作好了或者指定了相应的匹配参数,其反馈信号也在伺服系统内联接完成,因此不需接线与调整。
(2)速度环是控制电动机转速亦即坐标轴运行速度的电路。速度调节器是比例积分(PI)调节器,其P、I调整值完全取决于所驱动坐标轴的负载大小和机械传动系统(导轨、传动机构)的传动刚度与传动间隙等机械特性,一旦这些特性发生明显变化时,首先需要对机械传动系统进行修复工作,然后重新调整速度环PI调节器。
速度环的最佳调节是在位置环开环的条件下才能完成的,这对于水平运动的坐标轴和转动坐标轴较容易进行,而对于垂向运动坐标轴则位置开环时会自动下落而发生危险,可以采取先摘下电动机空载调整,然后再装好电动机与位置环一起调整或者直接带位置环一起调整,这时需要有一定的经验和细心。
速度环的反馈环节见前面“速度测量”一节。
(3)位置环是控制各坐标轴按指令位置精确定位的控制环节。位置环将最终影响坐标轴的位置精度及工作精度。这其中有两方面的工作:
一是位置测量元件的精度与CNC系统脉冲当量的匹配问题。测量元件单位移动距离发出的脉
冲数目经过外部倍频电路和/或CNC内部倍频系数的倍频后要与数控系统规定的分辨率相符。例如位置测量元件10脉冲/mm,数控系统分辨率即脉冲当量为0.001mm,则测量元件送出的脉冲必须经过100倍频方可匹配。
二是位置环增益系数Kv值的正确设定与调节。通常Kv值是作为机床数据设置的,数控系统中对各个坐标轴分别指定了Kv值的设置地址和数值单位。在速度环最佳化调节后Kv值的设定则成为反映机床性能好坏、影响最终精度的重要因素。Kv值是机床运动坐标自身性能优劣的直接表现而并非可以任意放大。关于Kv值的设置要注意两个问题,首先要满足下列公式:
Kv=v/Δ
式中v——坐标运行速度,m/min
Δ——跟踪误差,mm
注意,不同的数控系统采用的单位可能不同,设置时要注意数控系统规定的单位。例如,坐标运行速度的单位是m/min,则Kv值单位为m/(mm•min),若v的单位为mm/s,则Kv的单位应为mm/(mm•s)。
其次要满足各联动坐标轴的Kv值必须相同,以保证合成运动时的精度。通常是以Kv值最低的坐标轴为准。
位置反馈(参见上节“位置测量”)有三种情况:一种是没有位置测量元件,为位置开环控制即无位置反馈,步进电机驱动一般即为开环;一种是半闭环控制,即位置测量元件不在坐标轴最终运动部件上,也就是说还有部分传动环节在位置闭环控制之外,这种情况要求环外传动部分应有相当的传动刚度和传动精度,加入反向间隙补偿和螺距误差补偿之后,可以得到很高的位置控制精度;第三种是全闭环控制,即位置测量元件安装在坐标轴的最终运动部件上,理论上这种控制的位置精度情况最好,但是它对整个机械传动系统的要求更高而不是低,如若不然,则会严重影响两坐标的动态精度,而使得机床只能在降低速度环和位置精度的情况下工作。影响全闭环控制精度的另一个重要问题是测量元件的精确安装问题,千万不可轻视。
(4)前馈控制与反馈相反,它是将指令值取出部分预加到后面的调节电路,其主要作用是减小跟踪误差以提高动态响应特性从而提高位置控制精度。因为多数机床没有设此功能,故本文不详述,只是要注意,前馈的加入必须是在上述三个控制环均最佳调试完毕后方可进行。
3.维修与排故技术
3.1.常见电气故障分类
数控机床的电气故障可按故障的性质、表象、原因或后果等分类。
(1)以故障发生的部位,分为硬件故障和软件故障。硬件故障是指电子、电器件、印制电路板、电线电缆、接插件等的不正常状态甚至损坏,这是需要修理甚至更换才可排除的故障。而软件故障一般是指PLC逻辑控制程序中产生的故障,需要输入或修改某些数据甚至修改PLC程序方可排除的故障。零件加工程序故障也属于软件故障。最严重的软件故障则是数控系统软件的缺损甚至丢失,这就只有与生产厂商或其服务机构联系解决了。
(2)以故障出现时有无指示,分为有诊断指示故障和无诊断指示故障。当今的数控系统都设计有完美的自诊断程序,时实监控整个系统的软、硬件性能,一旦发现故障则会立即报警或者还有简要文字说明在屏幕上显示出来,结合系统配备的诊断手册不仅可以找到故障发生的原因、部位,而且还有排除的方法提示。机床制造者也会针对具体机床设计有相关的故障指示及诊断说明书。上述这两部分有诊断指示的故障加上各电气装置上的各类指示灯使得绝大多数电气故障的排除较为容易。无诊断指示的故障一部分是上述两种诊断程序的不完整性所致(如开关不闭合、接插松动等)。这类故障则要依靠对产生故障前的工作过程和故障现象及后果,并依靠维修人员对机床的熟悉程度和技术水平加以分析、排除。
(3)以故障出现时有无破坏性,分为破坏性故障和非破坏性故障。对于破坏性故障,损坏工 件甚至机床的故障,维修时不允许重演,这时只能根据产生故障时的现象进行相应的检查、分析来排除之,技术难度较高且有一定风险。如果可能会损坏工件,则可卸下工件,试着重现故障过程,但应十分小心。
(4)以故障出现的或然性,分为系统性故障和随机性故障。
系统性故障是指只要满足一定的条件则一定会产生的确定的故障;而随机性故障是指在相同的条件下偶尔发生的故障,这类故障的分析较为困难,通常多与机床机械结构的局部松动错位、部分电气工件特性漂移或可靠性降低、电气装置内部温度过高有关。此类故障的分析需经反复试验、综合判断才可能排除。
(5)以机床的运动品质特性来衡量,则是机床运动特性下降的故障。
在这种情况下,机床虽能正常运转却加工不出合格的工件。例如机床定位精度超差、反向死区过大、坐标运行不平稳等。这类故障必须使用检测仪器确诊产生误差的机、电环节,然后通过对机械传动系统、数控系统和伺服系统的最佳化调整来排除。
此处故障的分类是为了便于故障的分析排除,而一种故障的产生往往是多种类型的混合,这就要求维修人员具体分析,参照上述分类采取相应的分析、排除法。
- 第1页:数控机床电气维修技术(1)
- 第2页:数控机床运动坐标的电气控制
- 上一篇文章:PLC的多功能自动车床应用
- 下一篇文章:数控刀具技术在航空领域的应用